Universe: a software platform for measuring and training an AI's general intelligence across the world's supply of games, websites and other applications.





Project description

Universe is a software platform for measuring and training an AI’s general intelligence across the world’s supply of games, websites and other applications. This is the universe open-source library, which provides a simple Gym interface to each Universe environment.
Universe allows anyone to train and evaluate AI agents on an extremely wide range of real-time, complex environments.
Universe makes it possible for any existing program to become an OpenAI Gym environment, without needing special access to the program’s internals, source code, or APIs. It does this by packaging the program into a Docker container, and presenting the AI with the same interface a human uses: sending keyboard and mouse events, and receiving screen pixels. Our initial release contains over 1,000 environments in which an AI agent can take actions and gather observations.
Additionally, some environments include a reward signal sent to the agent, to guide reinforcement learning. We’ve included a few hundred environments with reward signals. These environments also include automated start menu clickthroughs, allowing your agent to skip to the interesting part of the environment.
We’d like the community’s help to grow the number of available environments, including integrating increasingly large and complex games.
The following classes of tasks are packaged inside of publicly-available Docker containers, and can be run today with no work on your part:
Atari and CartPole environments over VNC: gym-core.Pong-v3, gym-core.CartPole-v0, etc.
Flashgames over VNC: flashgames.DuskDrive-v0, etc.
Browser tasks (“World of Bits”) over VNC: wob.mini.TicTacToe-v0, etc.
We’ve scoped out integrations for many other games, including completing a high-quality GTA V integration (thanks to Craig Quiter and NVIDIA), but these aren’t included in today’s release.
Getting started
Installation
Supported systems
We currently support Linux and OSX running Python 2.7 or 3.5.
We recommend setting up a conda environment before getting started, to keep all your Universe-related packages in the same place.
Install Universe
To get started, first install universe:
git clone https://github.com/openai/universe.git
cd universe
pip install -e .If this errors out, you may be missing some required packages. Here’s the list of required packages we know about so far (please let us know if you had to install any others).
On Ubuntu 16.04:
pip install numpy
sudo apt-get install golang libjpeg-turbo8-dev makeOn Ubuntu 14.04:
sudo add-apt-repository ppa:ubuntu-lxc/lxd-stable # for newer golang
sudo apt-get update
sudo apt-get install golang libjpeg-turbo8-dev makeOn OSX:
You might need to install Command Line Tools by running:
xcode-select --installOr numpy, libjpeg-turbo and incremental packages:
pip install numpy incremental
brew install golang libjpeg-turboInstall Docker
The majority of the environments in Universe run inside Docker containers, so you will need to install Docker (on OSX, we recommend Docker for Mac). You should be able to run docker ps and get something like this:
$ docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMESNotes on installation
When installing universe, you may see warning messages. These lines occur when installing numpy and are normal.
You’ll need a go version of at least 1.5. Ubuntu 14.04 has an older Go, so you’ll need to upgrade your Go installation.
We run Python 3.5 internally, so the Python 3.5 variants will be much more thoroughly performance tested. Please let us know if you see any issues on 2.7.
While we don’t officially support Windows, we expect our code to be very close to working there. We’d be happy to take pull requests that take our Windows compatibility to 100%.
System overview
A Universe environment is similar to any other Gym environment: the agent submits actions and receives observations using the step() method.
Internally, a Universe environment consists of two pieces: a client and a remote:
The client is a VNCEnv instance which lives in the same process as the agent. It performs functions like receiving the agent’s actions, proxying them to the remote, queuing up rewards for the agent, and maintaining a local view of the current episode state.
The remote is the running environment dynamics, usually a program running inside of a Docker container. It can run anywhere – locally, on a remote server, or in the cloud. (We have a separate page describing how to manage remotes.)
The client and the remote communicate with one another using the VNC remote desktop system, as well as over an auxiliary WebSocket channel for reward, diagnostic, and control messages. (For more information on client-remote communication, see the separate page on the Universe internal communication protocols.)
The code in this repository corresponds to the client side of the Universe environments. Additionally, you can freely access the Docker images for the remotes. We’ll release the source repositories for the remotes in the future, along with tools to enable users to integrate new environments. Please sign up for our beta if you’d like early access.
Run your first agent
Now that you’ve installed the universe library, you should make sure it actually works. You can paste the example below into your python REPL. (You may need to press enter an extra time to make sure the while loop is executing.)
import gym
import universe # register the universe environments
env = gym.make('flashgames.DuskDrive-v0')
env.configure(remotes=1) # automatically creates a local docker container
observation_n = env.reset()
while True:
action_n = [[('KeyEvent', 'ArrowUp', True)] for ob in observation_n] # your agent here
observation_n, reward_n, done_n, info = env.step(action_n)
env.render()The example will instantiate a client in your Python process, automatically pull the quay.io/openai/universe.flashgames image, and will start that image as the remote. (In our remotes documentation page, we explain other ways you can run remotes.)
It will take a few minutes for the image to pull the first time. After that, if all goes well, a window like the one below will soon pop up. Your agent, which is just pressing the up arrow repeatedly, is now playing a Flash racing game called Dusk Drive. Your agent is programmatically controlling a VNC client, connected to a VNC server running inside of a Docker container in the cloud, rendering a headless Chrome with Flash enabled:
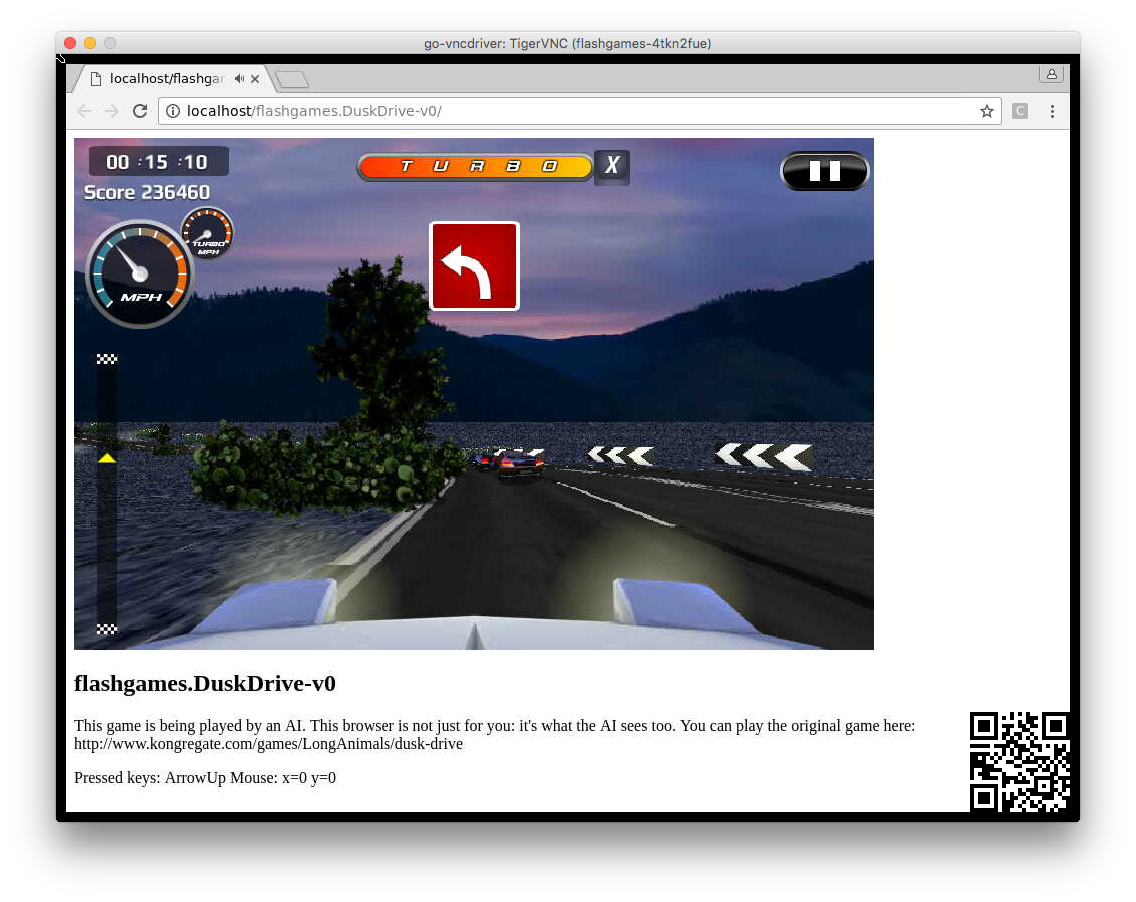
You can even connect your own VNC client to the environment, either just to observe or to interfere with your agent. Our flashgames and gym-core images conveniently bundle a browser-based VNC client, which can be accessed at http://localhost:15900/viewer/?password=openai. If you’re on Mac, connecting to a VNC server is as easy as running: open vnc://localhost:5900.
(If using docker-machine, you’ll need to replace “localhost” with the IP address of your Docker daemon, and use openai as the password.)
Breaking down the example
So we managed to run an agent, what did all the code actually mean? We’ll go line-by-line through the example.
First, we import the gym library, which is the base on which Universe is built. We also import universe, which registers all the Universe environments.
import gym
import universe # register the universe environmentsNext, we create the environment instance. Behind the scenes, gym looks up the registration for flashgames.DuskDrive-v0, and instantiates a VNCEnv object which has been wrapped to add a few useful diagnostics and utilities. The VNCEnv object is the client part of the environment, and it is not yet connected to a remote.
env = gym.make('flashgames.DuskDrive-v0')The call to configure() connects the client to a remote environment server. When called with configure(remotes=1), Universe will automatically create a Docker image running locally on your computer. The local client connects to the remote using VNC. (More information on client-remote communication can be found in the page on universe internal communication protocols. More on configuring remotes is at remotes.)
env.configure(remotes=1)When starting a new environment, you call env.reset(). Universe environments run in real-time, rather than stepping synchronously with the agent’s actions, so reset is asynchronous and returns immediately. Since the environment will not have waited to finish connecting to the VNC server before returning, the initial observations from reset will be None to indicate that there is not yet a valid observation.
Similarly, the environment keeps running in the background even if the agent does not call env.step(). This means that an agent that successfully learns from a Universe environment cannot take “thinking breaks”: it must keep sending actions to the environment at all times.
Additionally, Universe introduces the vectorized Gym API. Rather than controlling a single environment at a time, the agent can control a fixed-size vector of n environments, each with its own remote. The return value from reset is therefore a vector of observations. For more information, see the separate page on environment semantics)
observation_n = env.reset()At each step() call, the agent submits a vector of actions; one for each environment instance it is controlling. Each VNC action is a list of events; above, each action is the single event “press the ArrowUp key”. The agent could press and release the key in one action by instead submitting [('KeyEvent', 'ArrowUp', True), ('KeyEvent', 'ArrowUp', False)] for each observation.
In fact, the agent could largely have the same effect by just submitting ('KeyEvent', 'ArrowUp', True) once and then calling env.step([[] for ob in observation_n]) thereafter, without ever releasing the key using ('KeyEvent', 'ArrowUp', False). The browser running inside the remote would continue to statefully represent the arrow key as being pressed. Sending other unrelated keypresses would not disrupt the up arrow keypress; only explicitly releasing the key would cancel it. There’s one slight subtlety: when the episode resets, the browser will reset, and will forget about the keypress; you’d need to submit a new ArrowUp at the start of each episode.
action_n = [[('KeyEvent', 'ArrowUp', True)] for ob in observation_n]After we submit the action to the environment and render one frame, step() returns a list of observations, a list of rewards, a list of “done” booleans indicating whether the episode has ended, and then finally an info dictionary of the form {'n': [{}, ...]}, in which you can access the info for environment i as info['n'][i].
Each environment’s info message contains useful diagnostic information, including latency data, client and remote timings, VNC update counts, and reward message counts.
observation_n, reward_n, done_n, info = env.step(action_n)
env.render()Testing
We are using pytest for tests. You can run them via:
pytestRun pytest --help for useful options, such as pytest -s (disables output capture) or pytest -k <expression> (runs only specific tests).
Additional documentation
More documentation not covered in this README can be found in the doc folder of this repository.
Getting help
If you encounter a problem that is not addressed in this README page or in the extra docs, then try our wiki page of solutions to common problems - and add to it if your solution isn’t there!
You can also search through the issues on this repository and our discussion board to see if another user has posted about the same problem or to ask for help from the community.
If you still can’t solve your problem after trying all of the above steps, please post an issue on this repository.
What’s next?
Get started training RL algorithms! You can try out the Universe Starter Agent, an implementation of the A3C algorithm that can solve several VNC environments.
For more information on how to manage remotes, see the separate documentation page on remotes.
Sign up for a beta to get early access to upcoming Universe releases, such as tools to integrate new Universe environments or a dataset of recorded human demonstrations.
Changelog
2017-02-08: The old location for wrappers.SafeActionSpace has been moved to wrappers.experimental.SafeActionSpace. SoftmaxClickMouse has also been moved to wrappers.experimental.SoftmaxClickMouse
2017-01-08: The wrappers.SafeActionSpace has been moved to wrappers.experimental.SafeActionSpace. The old location will remain with a deprecation warning until 2017-02-08.
2016-12-27: BACKWARDS INCOMPATIBILITY: The gym monitor is now a wrapper. Rather than starting monitoring as env.monitor.start(directory), envs are now wrapped as follows: env = wrappers.Monitor(env, directory). This change is on master and will be released with 0.21.0.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.







