Solves all kinds of geographical position calculations.

Project description
nvector






Nvector is a suite of tools written in Python to solve geographical position calculations like:
Calculate the surface distance between two geographical positions.
Convert positions given in one reference frame into another reference frame.
Find the destination point given start point, azimuth/bearing and distance.
Find the mean position (center/midpoint) of several geographical positions.
Find the intersection between two paths.
Find the cross track distance between a path and a position.
Description
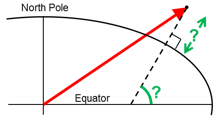
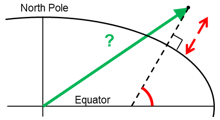
In this library, we represent position with an “n-vector”, which is the normal vector to the Earth model (the same reference ellipsoid that is used for latitude and longitude). When using n-vector, all Earth-positions are treated equally, and there is no need to worry about singularities or discontinuities. An additional benefit with using n-vector is that many position calculations can be solved with simple vector algebra (e.g. dot product and cross product).
Converting between n-vector and latitude/longitude is unambiguous and easy using the provided functions.
n_E is n-vector in the program code, while in documents we use nE. E denotes an Earth-fixed coordinate frame, and it indicates that the three components of n-vector are along the three axes of E. More details about the notation and reference frames can be found here:
Documentation and code
Official documentation:
http://www.navlab.net/nvector/
http://nvector.readthedocs.io/en/latest/
- Kenneth Gade (2010):
Bleeding edge: https://github.com/pbrod/nvector.
Official releases available at: http://pypi.python.org/pypi/nvector.
Installation
If you have pip installed and are online, then simply type:
$ pip install nvector
to get the lastest stable version. Using pip also has the advantage that all requirements are automatically installed.
You can download nvector and all dependencies to a folder “pkg”, by the following:
$ pip install –download=pkg nvector
To install the downloaded nvector, just type:
$ pip install –no-index –find-links=pkg nvector
Unit tests
To test if the toolbox is working paste the following in an interactive python session:
import nvector as nv
nv.test('--doctest-modules')
or
$ py.test –pyargs nvector –doctest-modules
at the command prompt.
Acknowledgement
The nvector package for Python was written by Per A. Brodtkorb at FFI (The Norwegian Defence Research Establishment) based on the nvector toolbox for Matlab written by the navigation group at FFI.
Most of the content is based on the following article:
- Kenneth Gade (2010):
Thus this article should be cited in publications using this page or the downloaded program code.
Getting Started
Below the object-oriented solution to some common geodesic problems are given. In the first example the functional solution is also given. The functional solutions to the remaining problems can be found here.
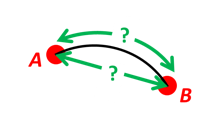
Example 1: “A and B to delta”
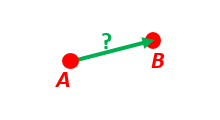
Given two positions, A and B as latitudes, longitudes and depths relative to Earth, E.
Find the exact vector between the two positions, given in meters north, east, and down, and find the direction (azimuth) to B, relative to north. Assume WGS-84 ellipsoid. The given depths are from the ellipsoid surface. Use position A to define north, east, and down directions. (Due to the curvature of Earth and different directions to the North Pole, the north, east, and down directions will change (relative to Earth) for different places. A must be outside the poles for the north and east directions to be defined.)
- Solution:
>>> import numpy as np >>> import nvector as nv >>> wgs84 = nv.FrameE(name='WGS84') >>> pointA = wgs84.GeoPoint(latitude=1, longitude=2, z=3, degrees=True) >>> pointB = wgs84.GeoPoint(latitude=4, longitude=5, z=6, degrees=True)
- Step1: Find p_AB_N (delta decomposed in N).
>>> p_AB_N = pointA.delta_to(pointB) >>> x, y, z = p_AB_N.pvector.ravel() >>> valtxt = '{0:8.2f}, {1:8.2f}, {2:8.2f}'.format(x, y, z) >>> 'Ex1: delta north, east, down = {}'.format(valtxt) 'Ex1: delta north, east, down = 331730.23, 332997.87, 17404.27'- Step2: Also find the direction (azimuth) to B, relative to north:
>>> azimuth = p_AB_N.azimuth_deg[0] >>> 'azimuth = {0:4.2f} deg'.format(azimuth) 'azimuth = 45.11 deg'- Functional Solution:
>>> import numpy as np >>> import nvector as nv >>> from nvector import rad, deg
>>> lat_EA, lon_EA, z_EA = rad(1), rad(2), 3 >>> lat_EB, lon_EB, z_EB = rad(4), rad(5), 6
- Step1: Convert to n-vectors:
>>> n_EA_E = nv.lat_lon2n_E(lat_EA, lon_EA) >>> n_EB_E = nv.lat_lon2n_E(lat_EB, lon_EB)
- Step2: Find p_AB_E (delta decomposed in E).WGS-84 ellipsoid is default:
>>> p_AB_E = nv.n_EA_E_and_n_EB_E2p_AB_E(n_EA_E, n_EB_E, z_EA, z_EB)
- Step3: Find R_EN for position A:
>>> R_EN = nv.n_E2R_EN(n_EA_E)
- Step4: Find p_AB_N (delta decomposed in N).
>>> p_AB_N = np.dot(R_EN.T, p_AB_E).ravel() >>> valtxt = '{0:8.2f}, {1:8.2f}, {2:8.2f}'.format(*p_AB_N) >>> 'Ex1: delta north, east, down = {}'.format(valtxt) 'Ex1: delta north, east, down = 331730.23, 332997.87, 17404.27'- Step5: Also find the direction (azimuth) to B, relative to north:
>>> azimuth = np.arctan2(p_AB_N[1], p_AB_N[0]) >>> 'azimuth = {0:4.2f} deg'.format(deg(azimuth)) 'azimuth = 45.11 deg'- See also
Example 2: “B and delta to C”
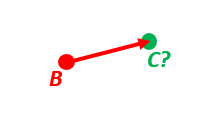
A radar or sonar attached to a vehicle B (Body coordinate frame) measures the distance and direction to an object C. We assume that the distance and two angles (typically bearing and elevation relative to B) are already combined to the vector p_BC_B (i.e. the vector from B to C, decomposed in B). The position of B is given as n_EB_E and z_EB, and the orientation (attitude) of B is given as R_NB (this rotation matrix can be found from roll/pitch/yaw by using zyx2R).
Find the exact position of object C as n-vector and depth ( n_EC_E and z_EC ), assuming Earth ellipsoid with semi-major axis a and flattening f. For WGS-72, use a = 6 378 135 m and f = 1/298.26.
- Solution:
>>> import nvector as nv >>> import numpy as np >>> wgs72 = nv.FrameE(name='WGS72') >>> wgs72 = nv.FrameE(a=6378135, f=1.0/298.26)
- Step 1: Position and orientation of B is given 400m above E:
>>> n_EB_E = wgs72.Nvector(nv.unit([[1], [2], [3]]), z=-400) >>> frame_B = nv.FrameB(n_EB_E, yaw=10, pitch=20, roll=30, degrees=True)
- Step 2: Delta BC decomposed in B
>>> p_BC_B = frame_B.Pvector(np.r_[3000, 2000, 100].reshape((-1, 1)))
- Step 3: Decompose delta BC in E
>>> p_BC_E = p_BC_B.to_ecef_vector()
- Step 4: Find point C by adding delta BC to EB
>>> p_EB_E = n_EB_E.to_ecef_vector() >>> p_EC_E = p_EB_E + p_BC_E >>> pointC = p_EC_E.to_geo_point()
>>> lat, lon, z = pointC.latlon_deg >>> msg = 'Ex2: PosC: lat, lon = {:4.2f}, {:4.2f} deg, height = {:4.2f} m' >>> msg.format(lat[0], lon[0], -z[0]) 'Ex2: PosC: lat, lon = 53.33, 63.47 deg, height = 406.01 m'- See also
Example 3: “ECEF-vector to geodetic latitude”
Position B is given as an “ECEF-vector” p_EB_E (i.e. a vector from E, the center of the Earth, to B, decomposed in E). Find the geodetic latitude, longitude and height (latEB, lonEB and hEB), assuming WGS-84 ellipsoid.
- Solution:
>>> import numpy as np >>> import nvector as nv >>> wgs84 = nv.FrameE(name='WGS84') >>> position_B = 6371e3 * np.vstack((0.9, -1, 1.1)) # m >>> p_EB_E = wgs84.ECEFvector(position_B) >>> pointB = p_EB_E.to_geo_point()
>>> lat, lon, z = pointB.latlon_deg >>> msg = 'Ex3: Pos B: lat, lon = {:4.2f}, {:4.2f} deg, height = {:9.2f} m' >>> msg.format(lat[0], lon[0], -z[0]) 'Ex3: Pos B: lat, lon = 39.38, -48.01 deg, height = 4702059.83 m'- See also
Example 4: “Geodetic latitude to ECEF-vector”
Geodetic latitude, longitude and height are given for position B as latEB, lonEB and hEB, find the ECEF-vector for this position, p_EB_E.
- Solution:
>>> import nvector as nv >>> wgs84 = nv.FrameE(name='WGS84') >>> pointB = wgs84.GeoPoint(latitude=1, longitude=2, z=-3, degrees=True) >>> p_EB_E = pointB.to_ecef_vector()
>>> 'Ex4: p_EB_E = {} m'.format(p_EB_E.pvector.ravel().tolist()) 'Ex4: p_EB_E = [ 6373290.27721828 222560.20067474 110568.82718179] m'- See also
Example 5: “Surface distance”
Find the surface distance sAB (i.e. great circle distance) between two positions A and B. The heights of A and B are ignored, i.e. if they don’t have zero height, we seek the distance between the points that are at the surface of the Earth, directly above/below A and B. The Euclidean distance (chord length) dAB should also be found. Use Earth radius 6371e3 m. Compare the results with exact calculations for the WGS-84 ellipsoid.
- Solution for a sphere:
>>> import numpy as np >>> import nvector as nv >>> frame_E = nv.FrameE(a=6371e3, f=0) >>> positionA = frame_E.GeoPoint(latitude=88, longitude=0, degrees=True) >>> positionB = frame_E.GeoPoint(latitude=89, longitude=-170, degrees=True)
>>> s_AB, _azia, _azib = positionA.distance_and_azimuth(positionB) >>> p_AB_E = positionB.to_ecef_vector() - positionA.to_ecef_vector() >>> d_AB = p_AB_E.length[0]
>>> msg = 'Ex5: Great circle and Euclidean distance = {}' >>> msg = msg.format('{:5.2f} km, {:5.2f} km') >>> msg.format(s_AB / 1000, d_AB / 1000) 'Ex5: Great circle and Euclidean distance = 332.46 km, 332.42 km'- Alternative sphere solution:
>>> path = nv.GeoPath(positionA, positionB) >>> s_AB2 = path.track_distance(method='greatcircle').ravel() >>> d_AB2 = path.track_distance(method='euclidean').ravel() >>> msg.format(s_AB2[0] / 1000, d_AB2[0] / 1000) 'Ex5: Great circle and Euclidean distance = 332.46 km, 332.42 km'
- Exact solution for the WGS84 ellipsoid:
>>> wgs84 = nv.FrameE(name='WGS84') >>> point1 = wgs84.GeoPoint(latitude=88, longitude=0, degrees=True) >>> point2 = wgs84.GeoPoint(latitude=89, longitude=-170, degrees=True) >>> s_12, _azi1, _azi2 = point1.distance_and_azimuth(point2)
>>> p_12_E = point2.to_ecef_vector() - point1.to_ecef_vector() >>> d_12 = p_12_E.length[0] >>> msg = 'Ellipsoidal and Euclidean distance = {:5.2f} km, {:5.2f} km' >>> msg.format(s_12 / 1000, d_12 / 1000) 'Ellipsoidal and Euclidean distance = 333.95 km, 333.91 km'- See also
Example 6 “Interpolated position”
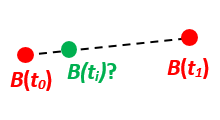
Given the position of B at time t0 and t1, n_EB_E(t0) and n_EB_E(t1).
Find an interpolated position at time ti, n_EB_E(ti). All positions are given as n-vectors.
- Solution:
>>> import nvector as nv >>> wgs84 = nv.FrameE(name='WGS84') >>> n_EB_E_t0 = wgs84.GeoPoint(89, 0, degrees=True).to_nvector() >>> n_EB_E_t1 = wgs84.GeoPoint(89, 180, degrees=True).to_nvector() >>> path = nv.GeoPath(n_EB_E_t0, n_EB_E_t1)
>>> t0 = 10. >>> t1 = 20. >>> ti = 16. # time of interpolation >>> ti_n = (ti - t0) / (t1 - t0) # normalized time of interpolation
>>> g_EB_E_ti = path.interpolate(ti_n).to_geo_point()
>>> lat_ti, lon_ti, z_ti = g_EB_E_ti.latlon_deg >>> msg = 'Ex6, Interpolated position: lat, lon = {} deg, {} deg' >>> msg.format(lat_ti, lon_ti) 'Ex6, Interpolated position: lat, lon = [ 89.7999805] deg, [ 180.] deg'- See also
Example 7: “Mean position”
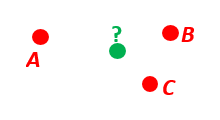
Three positions A, B, and C are given as n-vectors n_EA_E, n_EB_E, and n_EC_E. Find the mean position, M, given as n_EM_E. Note that the calculation is independent of the depths of the positions.
- Solution:
>>> import nvector as nv >>> points = nv.GeoPoint(latitude=[90, 60, 50], ... longitude=[0, 10, -20], degrees=True) >>> nvectors = points.to_nvector() >>> n_EM_E = nvectors.mean() >>> g_EM_E = n_EM_E.to_geo_point() >>> lat, lon = g_EM_E.latitude_deg, g_EM_E.longitude_deg >>> msg = 'Ex7: Pos M: lat, lon = {:4.2f}, {:4.2f} deg' >>> msg.format(lat[0], lon[0]) 'Ex7: Pos M: lat, lon = 67.24, -6.92 deg'- See also
Example 8: “A and azimuth/distance to B”
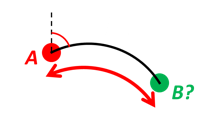
We have an initial position A, direction of travel given as an azimuth (bearing) relative to north (clockwise), and finally the distance to travel along a great circle given as sAB. Use Earth radius 6371e3 m to find the destination point B.
In geodesy this is known as “The first geodetic problem” or “The direct geodetic problem” for a sphere, and we see that this is similar to Example 2, but now the delta is given as an azimuth and a great circle distance. (“The second/inverse geodetic problem” for a sphere is already solved in Examples 1 and 5.)
- Solution:
>>> import nvector as nv >>> frame = nv.FrameE(a=6371e3, f=0) >>> pointA = frame.GeoPoint(latitude=80, longitude=-90, degrees=True) >>> pointB, _azimuthb = pointA.displace(distance=1000, azimuth=200, ... degrees=True) >>> lat, lon = pointB.latitude_deg, pointB.longitude_deg
>>> msg = 'Ex8, Destination: lat, lon = {:4.2f} deg, {:4.2f} deg' >>> msg.format(lat, lon) 'Ex8, Destination: lat, lon = 79.99 deg, -90.02 deg'- See also
Example 9: “Intersection of two paths”
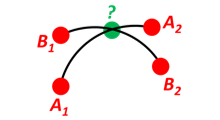
Define a path from two given positions (at the surface of a spherical Earth), as the great circle that goes through the two points.
Path A is given by A1 and A2, while path B is given by B1 and B2.
Find the position C where the two great circles intersect.
- Solution:
>>> import nvector as nv >>> pointA1 = nv.GeoPoint(10, 20, degrees=True) >>> pointA2 = nv.GeoPoint(30, 40, degrees=True) >>> pointB1 = nv.GeoPoint(50, 60, degrees=True) >>> pointB2 = nv.GeoPoint(70, 80, degrees=True) >>> pathA = nv.GeoPath(pointA1, pointA2) >>> pathB = nv.GeoPath(pointB1, pointB2)
>>> pointC = pathA.intersect(pathB) >>> np.allclose(pathA.on_path(pointC), pathB.on_path(pointC)) True >>> np.allclose(pathA.on_great_circle(pointC), ... pathB.on_great_circle(pointC)) True >>> pointC = pointC.to_geo_point() >>> lat, lon = pointC.latitude_deg, pointC.longitude_deg >>> msg = 'Ex9, Intersection: lat, lon = {:4.2f}, {:4.2f} deg' >>> msg.format(lat[0], lon[0]) 'Ex9, Intersection: lat, lon = 40.32, 55.90 deg'- See also
Example 10: “Cross track distance”

Path A is given by the two positions A1 and A2 (similar to the previous example).
Find the cross track distance sxt between the path A (i.e. the great circle through A1 and A2) and the position B (i.e. the shortest distance at the surface, between the great circle and B).
Also find the Euclidean distance dxt between B and the plane defined by the great circle. Use Earth radius 6371e3.
Finally, find the intersection point on the great circle and determine if it is between position A1 and A2.
- Solution:
>>> import nvector as nv >>> frame = nv.FrameE(a=6371e3, f=0) >>> pointA1 = frame.GeoPoint(0, 0, degrees=True) >>> pointA2 = frame.GeoPoint(10, 0, degrees=True) >>> pointB = frame.GeoPoint(1, 0.1, degrees=True) >>> pathA = nv.GeoPath(pointA1, pointA2)
>>> s_xt = pathA.cross_track_distance(pointB, method='greatcircle').ravel() >>> d_xt = pathA.cross_track_distance(pointB, method='euclidean').ravel()
>>> val_txt = '{:4.2f} km, {:4.2f} km'.format(s_xt[0]/1000, d_xt[0]/1000) >>> 'Ex10: Cross track distance: s_xt, d_xt = {}'.format(val_txt) 'Ex10: Cross track distance: s_xt, d_xt = 11.12 km, 11.12 km'>>> pointC = pathA.closest_point_on_great_circle(pointB) >>> np.allclose(pathA.on_path(pointC), True) True
- See also
See also
Changelog
Version 0.7.0, June 02, 2019
- Gary van der Merwe (1):
Add interpolate to __all__ so that it can be imported
- Per A Brodtkorb (26):
Updated long_description in setup.cfg
Replaced deprecated sphinx.ext.png.math with sphinx.ext.img.math
Added pngmath to requirements for building the docs.
- Fixing shallow clone warning. Replaced property
‘sonar.python.coverage.itReportPath’ with ‘sonar.python.coverage.reportPaths’ instead, because it is has been removed.
Drop python 3.4 support
Added python 3.7 support
- Fixed a bug: Mixed scalars and np.array([1]) values don’t work with
np.rad2deg function.
- Added ETRS ELLIPSOID in _core.py Added ED50 as alias for International
(Hayford)/European Datum in _core.py Added sad69 as alias for South American 1969 in _core.py
Simplified docstring for nv.test
Generalized the setup.py.
Replaced aliases with the correct names in setup.cfg.
Version 0.6.0, December 09, 2018
- Per A Brodtkorb (79):
Updated requirements in setup.py
Removed tox.ini
Updated documentation on how to set package version
Made a separate script to set package version in nvector/__init__.py
Updated docstring for select_ellipsoid
Replace GeoPoint.geo_point with GeoPoint.displace and removed deprecated GeoPoint.geo_point
Update .travis.yml
Fix so that codeclimate is able to parse .travis.yml
Only run sonar and codeclimate reporter for python v3.6
Added sonar-project.properties
- Pinned coverage to v4.3.4 due to fact that codeclimate reporter is only
compatible with Coverage.py versions >=4.0,<4.4.
Updated with sonar scanner.
Added .pylintrc
Set up codeclimate reporter
Updated docstring for unit function.
Avoid division by zero in unit function.
Reenabled the doctest of plot_mean_position
Reset “pyscaffold==2.5.11”
Replaced deprecated basemap with cartopy.
- Replaced doctest of plot_mean_position with test_plot_mean_position in
test_plot.py
- Fixed failing doctests for python v3.4 and v3.5 and made them more
robust.
Fixed failing doctests and made them more robust.
Increased pycoverage version to use.
moved nvector to src/nvector/
- Reset the setup.py to require ‘pyscaffold==2.5.11’ which works on
python version 3.4, 3.5 and 3.6. as well as 2.7
Updated unittests.
Updated tests.
Removed obsolete code
Added test for delta_L
- Added corner testcase for
pointA.displace(distance=1000,azimuth=np.deg2rad(200))
Added test for path.track_distance(method=’exact’)
- Added delta_L a function thet teturn cartesian delta vector from
positions A to B decomposed in L.
Simplified OO-solution in example 1 by using delta_N function
Refactored duplicated code
- Vectorized code so that the frames can take more than one position at
the time.
Keeping only the html docs in the distribution.
- replaced link from latest to stable docs on readthedocs and updated
crosstrack distance test.
updated documentation in setup.py
Version 0.5.2, March 7, 2017
- Per A Brodtkorb (10):
Fixed tests in tests/test_frames.py
Updated to setup.cfg and tox.ini + pep8
updated .travis.yml
Updated Readme.rst with new example 10 picture and link to nvector docs at readthedocs.
updated official documentation links
Updated crosstrack distance tests.
Version 0.5.1, March 5, 2017
- Cody (4):
Explicitely numbered replacement fields
Migrated % string formating
- Per A Brodtkorb (29):
pep8
Updated failing examples
Updated README.rst
Removed obsolete pass statement
Documented functions
added .checkignore for quantifycode
moved test_docstrings and use_docstring_from into _common.py
Added .codeclimate.yml
Updated installation information in _info.py
Added GeoPath.on_path method. Clearified intersection example
Added great_circle_normal, cross_track_distance Renamed intersection to intersect (Intersection is deprecated.)
Simplified R2zyx with a call to R2xyz Improved accuracy for great circle cross track distance for small distances.
Added on_great_circle, _on_great_circle_path, _on_ellipsoid_path, closest_point_on_great_circle and closest_point_on_path to GeoPath
made __eq__ more robust for frames
Removed duplicated code
Updated tests
Removed fishy test
replaced zero n-vector with nan
Commented out failing test.
Added example 10 image
Added ‘closest_point_on_great_circle’, ‘on_great_circle’,’on_great_circle_path’.
Updated examples + documentation
Updated index depth
Updated README.rst and classifier in setup.cfg
Version 0.4.1, January 19, 2016
pbrod (46):
Cosmetic updates
Updated README.rst
updated docs and removed unused code
updated README.rst and .coveragerc
Refactored out _check_frames
Refactored out _default_frame
Updated .coveragerc
Added link to geographiclib
Updated external link
Updated documentation
Added figures to examples
Added GeoPath.interpolate + interpolation example 6
Added links to FFI homepage.
- Updated documentation:
Added link to nvector toolbox for matlab
For each example added links to the more detailed explanation on the homepage
Updated link to nvector toolbox for matlab
Added link to nvector on pypi
Updated documentation fro FrameB, FrameE, FrameL and FrameN.
updated __all__ variable
Added missing R_Ee to function n_EA_E_and_n_EB_E2azimuth + updated documentation
Updated CHANGES.rst
Updated conf.py
Renamed info.py to _info.py
All examples are now generated from _examples.py.
Version 0.1.3, January 1, 2016
pbrod (31):
Refactored
Updated tests
Updated docs
Moved tests to nvector/tests
Updated .coverage Added travis.yml, .landscape.yml
Deleted obsolete LICENSE
Updated README.rst
Removed ngs version
Fixed bug in .travis.yml
Updated .travis.yml
Removed dependence on navigator.py
Updated README.rst
Updated examples
Deleted skeleton.py and added tox.ini
Small refactoring Renamed distance_rad_bearing_rad2point to n_EA_E_distance_and_azimuth2n_EB_E updated tests
Renamed azimuth to n_EA_E_and_n_EB_E2azimuth Added tests for R2xyz as well as R2zyx
Removed backward compatibility Added test_n_E_and_wa2R_EL
Refactored tests
Commented out failing tests on python 3+
updated CHANGES.rst
Removed bug in setup.py
Version 0.1.1, January 1, 2016
- pbrod (31):
Initial commit: Translated code from Matlab to Python.
Added object oriented interface to nvector library
Added tests for object oriented interface
Added geodesic tests.
License
The content of this library is based on the following publication:
Gade, K. (2010). A Nonsingular Horizontal Position Representation, The Journal of Navigation, Volume 63, Issue 03, pp 395-417, July 2010. (www.navlab.net/Publications/A_Nonsingular_Horizontal_Position_Representation.pdf)
This paper should be cited in publications using this library.
Copyright (c) 2015, Norwegian Defence Research Establishment (FFI) All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
1. Redistributions of source code must retain the above publication information, copyright notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above publication information, copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS “AS IS” AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Contributers
Kenneth Gade, FFI: Main author of Matlab toolbox nvector. Kristian Svartveit, FFI: Contributions to matlab code: R_Ee.m and unit.m. Brita Hafskjold Gade, FFI: Contributions to matlab code: n_EB_E2p_EB_E.m, p_EB_E2n_EB_E.m Per A Brodtkorb, FFI: Translation of nvector from matlab to Python.
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Hashes for nvector-0.7.0-py2.py3-none-any.whl
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 | 7fa4cece7d35ab3e1a6f73b6d4e2dab0d234f9b07dc22676471aa3f4aba5c150 |
|
| MD5 | 5c061ffd16094199eda030bd67ecd73f |
|
| BLAKE2b-256 | d470d018ee8377675d9a0e7d861a966c2168fefa83516c99935ba1e639959438 |







