Research software for navigating a UAV in indoor environments

Project description




A Python package for simulating UAV Navigation in Satellite-Less Environments. The package contains two algorithms the GTRS [1] and WLS [2] whose goal is to estimate and navigate a UAV.
Installation
Install from PyPI:
pip install --upgrade pip
pip install autonav
First Steps
After installing the package one can import the algorithms and necessary dependencies as follows:
import matplotlib.pyplot as plt
from autonav import gtrs, wls
from autonav.file_handlers import readpathfile
from autonav.plots import plot_trajectories
from numpy import array
Afterwards, one can create the necessary values to run the algorithms:
# Area border
b = 200
# Number of anchors
n = 8
# Position of the anchors
a_i = array(
[
[0, 0, 0],
[0, b, 0],
[b / 2, 0, 0],
[b / 2, b, 0],
[0, 0, b / 8],
[0, b, b / 8],
[b / 2, 0, b / 8],
[b / 2, b, b / 8],]
).T
# Number of measurement samples
k = 50
# Noise standard deviation
sigma = 1
# Maximum velocity allowed to the UAV
v_max = b / 100
# Distance threshold
tau = b / 50
# Smoothing factor
gamma = b / 100
# Initial position of the UAV
initial_uav_position = [10, 10, 5]
# File containing the waypoints
destinations = readpathfile("docs/docs/examples/Path.csv")
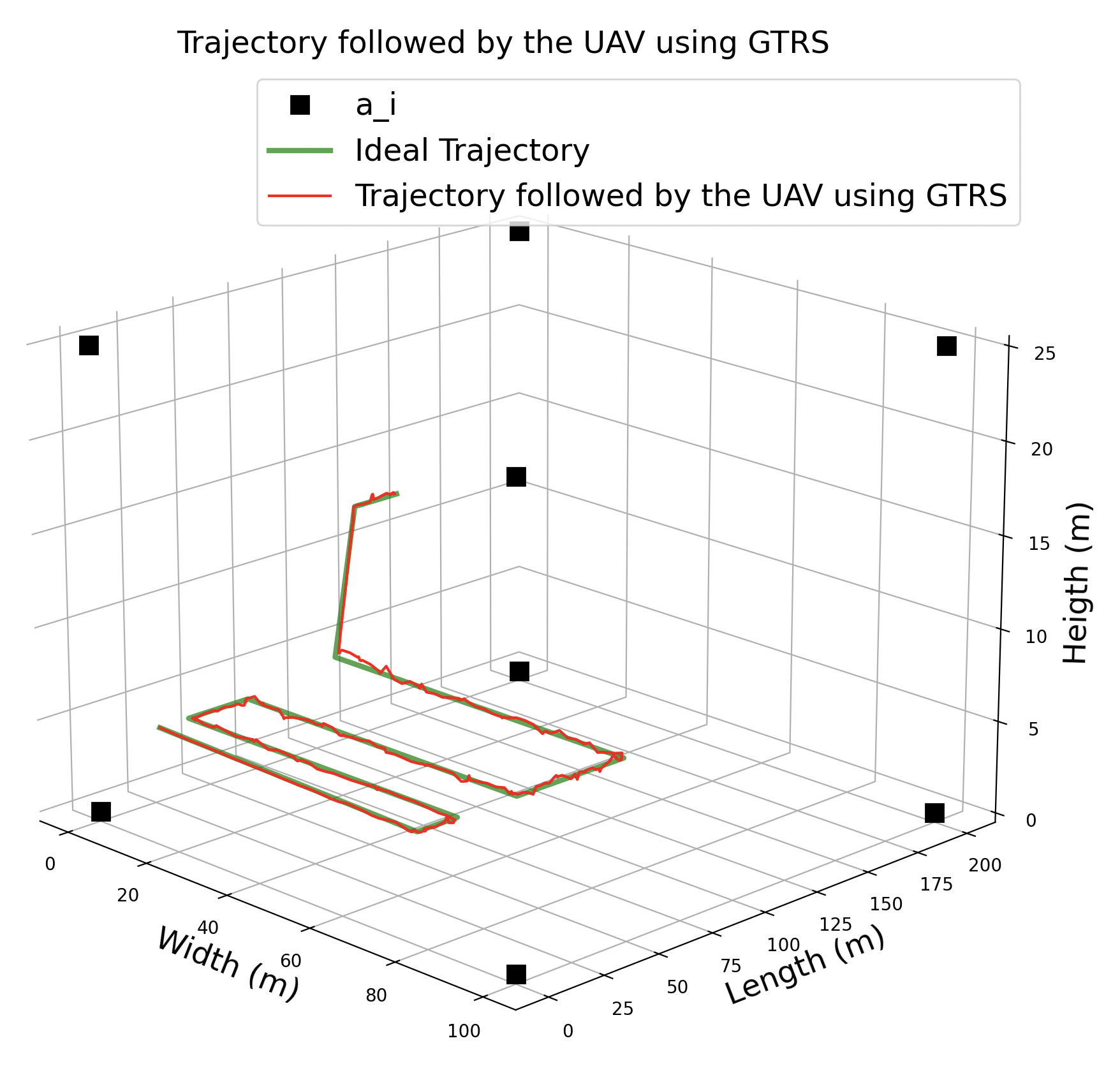
Finally, run the GTRS or WLS algorithm and plot the trajectories:
# Estimate the trajectory using the GTRS algorithm
[estimated_trajectory, true_trajectory] = gtrs(a_i, n, k, sigma, destinations, initial_uav_position, v_max, tau, gamma)
# Plot the estimated trajectory
plot_trajectories(destinations, [estimated_trajectory], a_i, ['GTRS'])
plt.show()
References
[1] J. P. Matos-Carvalho, R. Santos, S. Tomic and M. Beko, "GTRS-Based Algorithm for UAV Navigation in Indoor Environments Employing Range Measurements and Odometry," in IEEE Access, vol. 9, pp. 89120-89132, 2021, doi: 10.1109/ACCESS.2021.3089900. https://ieeexplore.ieee.org/document/9456863
[2] R. Santos, J. P. Matos-Carvalho, S. Tomic and M. Beko, "WLS algorithm for UAV navigation in satellite‐less environments," in IET Wireless Sensor Systems, 2022, 12, (3-4), p. 93-102, DOI: 10.1049/wss2.12041 IET Digital Library, https://ietresearch.onlinelibrary.wiley.com/doi/full/10.1049/wss2.12041
License


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.







