Correction for radial distortion and perspective distortion in Python

Project description
Discorpy
(Dis)tortion (Cor)rection (Py)thon-package
Distortion calibration and correction software for lens-based detector systems
Discorpy is an open-source Python package for distortion correction with sub-pixel accuracy as required by tomography detector systems. It calculates parameters of correction models using a grid pattern image. The package implements methods published by Nghia T. Vo et al. "Radial lens distortion correction with sub-pixel accuracy for X-ray micro- tomography," Optics Express, 23, 32859-32868 (2015), https://doi.org/10.1364/OE.23.032859. From version 1.4, correction for perspective distortion has been added to the package.
Author: Nghia Vo, Diamond Light Source, UK.
Update notes
- 25/02/2021: the package name is changed from Vounwarp to Discorpy. The old-name package is still available at https://github.com/nghia-vo/vounwarp and installable using conda-forge channel: https://anaconda.org/conda-forge/vounwarp
- 21/11/2021: Correction for perspective distortion, pre-processing methods for line-pattern images and chessboard images are added to the package.
Features
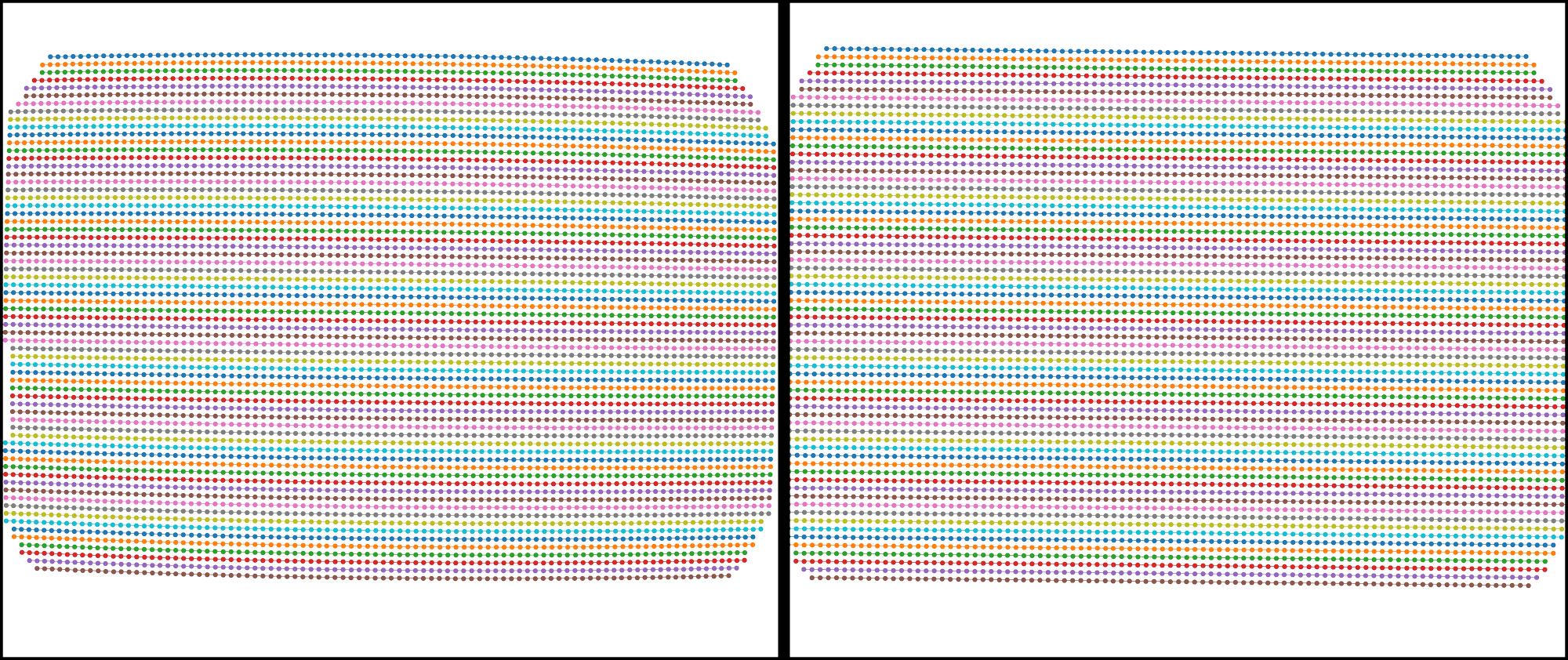
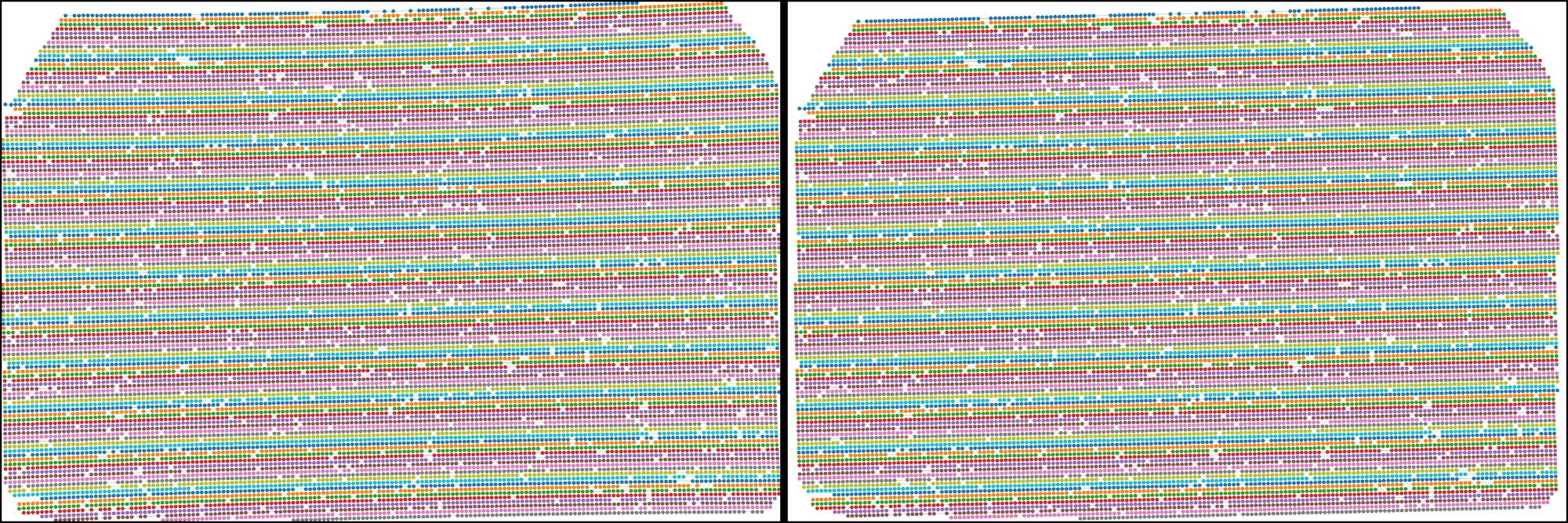
- Pre-processing methods for: extracting reference-points from a dot-pattern image, line-pattern image, and chessboard image; grouping these points line-by-line.
- Processing methods for calculating the optical center, coefficients of polynomial models for correcting radial distortion, and parameters of a model for correcting perspective distortion.
- Post-processing methods for: undistorting lines of points, images, or slices of a 3D dataset; and evaluating the accuracy of the correction results.
- Some methods may be useful for other applications:
- Correct non-uniform background using a FFT-based filter and a median filter.
- Select binary objects in a certain range of values.
- Unwarp slices of a 3D dataset.
Documentation
Installation
How to use
Demonstrations
-
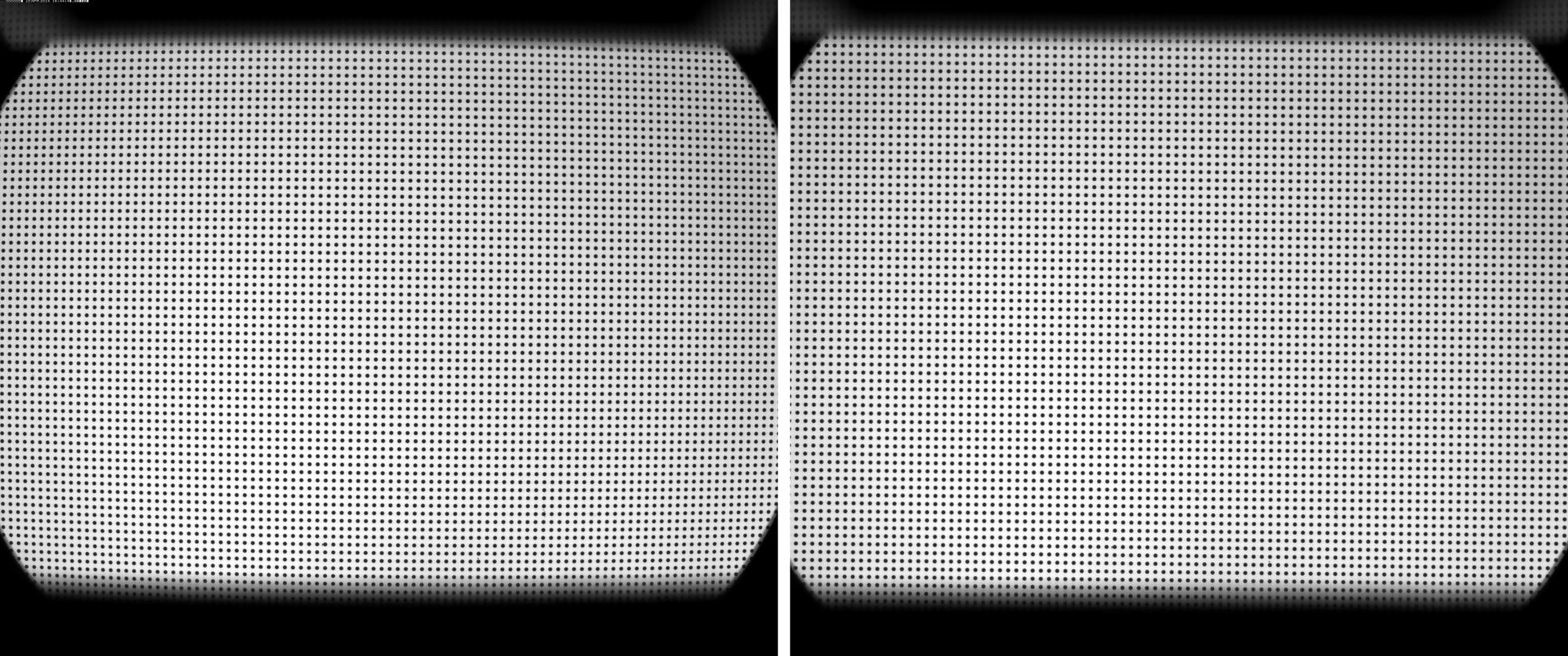
Apply to a visible dot-target collected at Beamline I12, Diamond Light Source, UK:
-
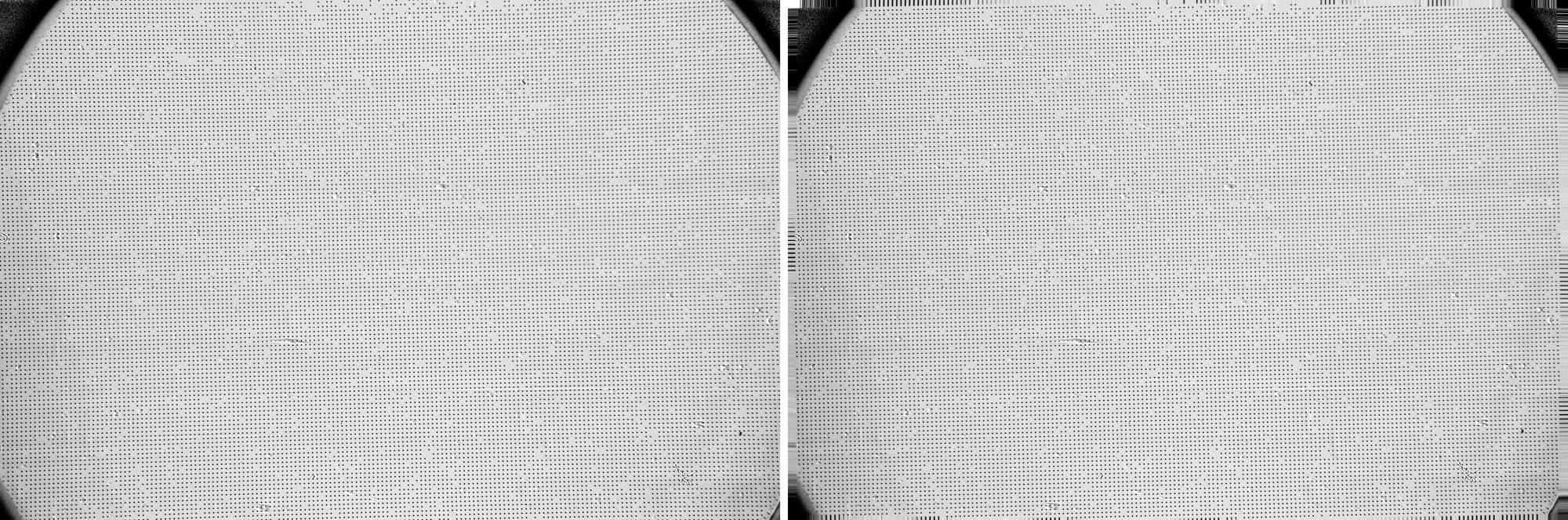
Apply to an X-ray dot-target collected at Beamline I13, Diamond Light Source, UK:
-
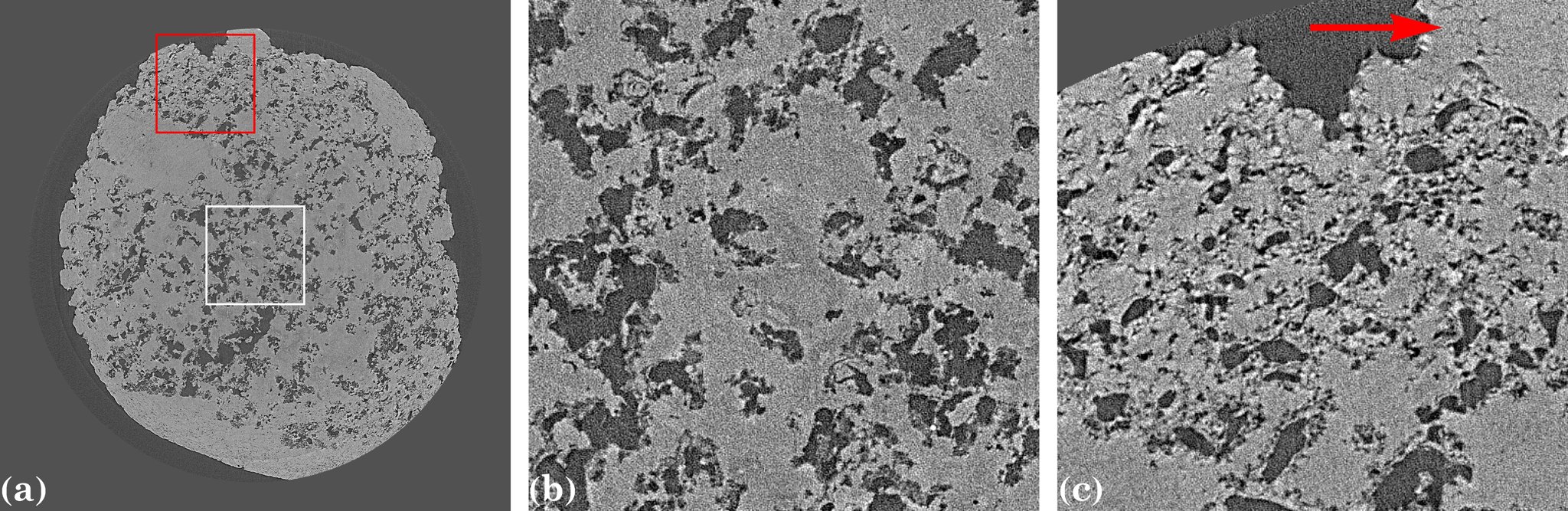
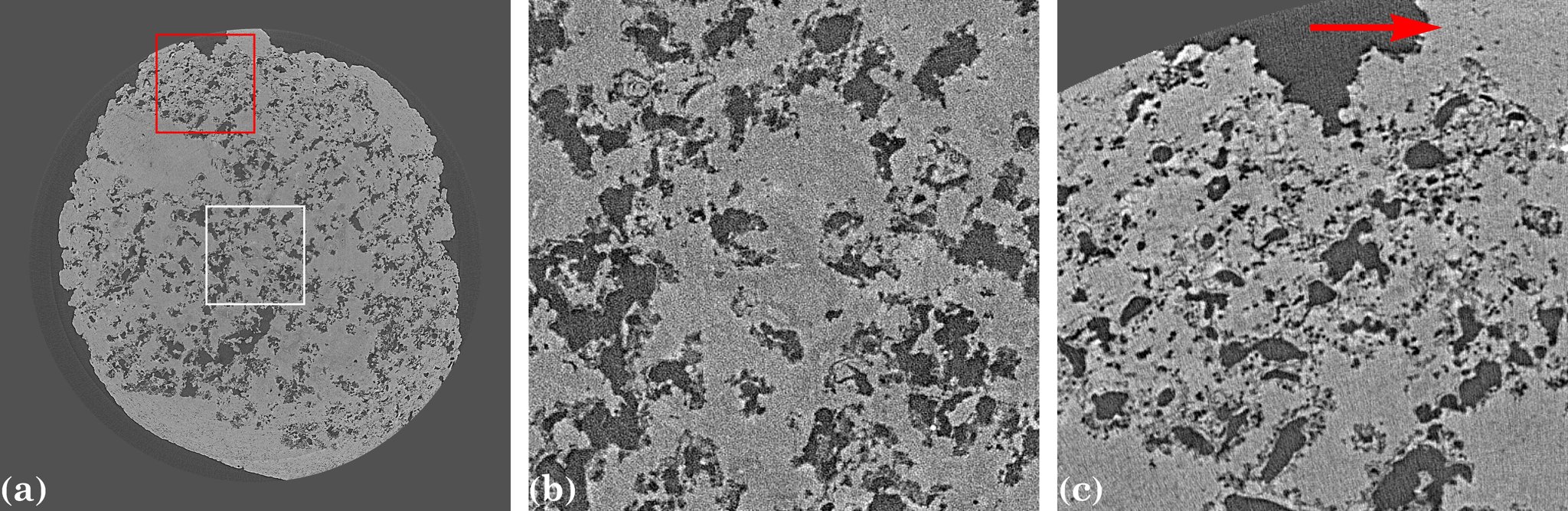
Improvement of a tomographic reconstructed image after distortion correction.
-
Before the correction:
-
After the correction:
-
-
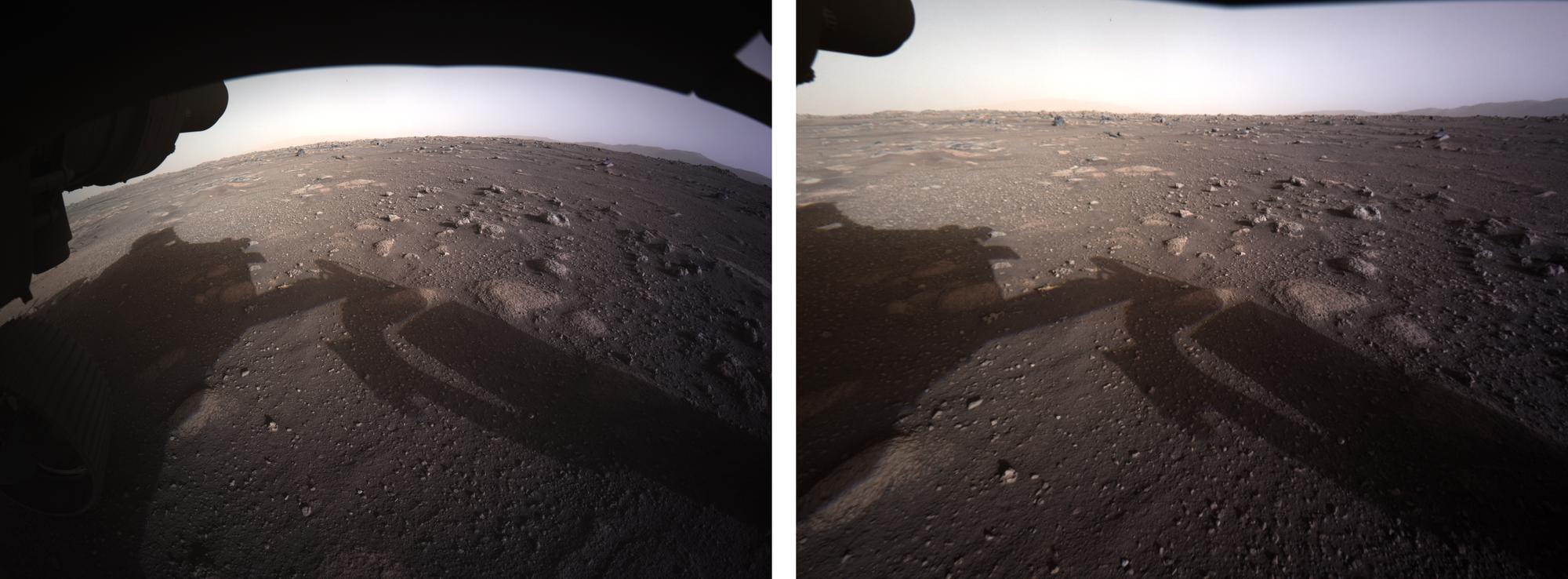
Apply to a hazard camera of the Mars Perseverance Rover. Details of how to estimate distortion coefficients of that camera without using a calibration target are shown here


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.







