Ptudes lab: odometry, SLAM and visualization experiments

Project description
This is a playground of various experiments with SLAM, mapping and visualization of lidar point clouds. (Ptudes name is an interplay of P(oint) (e)Tudes, derived from Etude)
It’s heavily using and relying on Ouster sensor lidar data, Ouster SDK, public datasets that contain Ouster lidar data and lidar odometry poses obtained from KISS-ICP package.
Everything in ptudes-lab package works for multi Python (3.8 - 3.11) and multi OS (Linux, MacOS, Windows).
Table of contents:
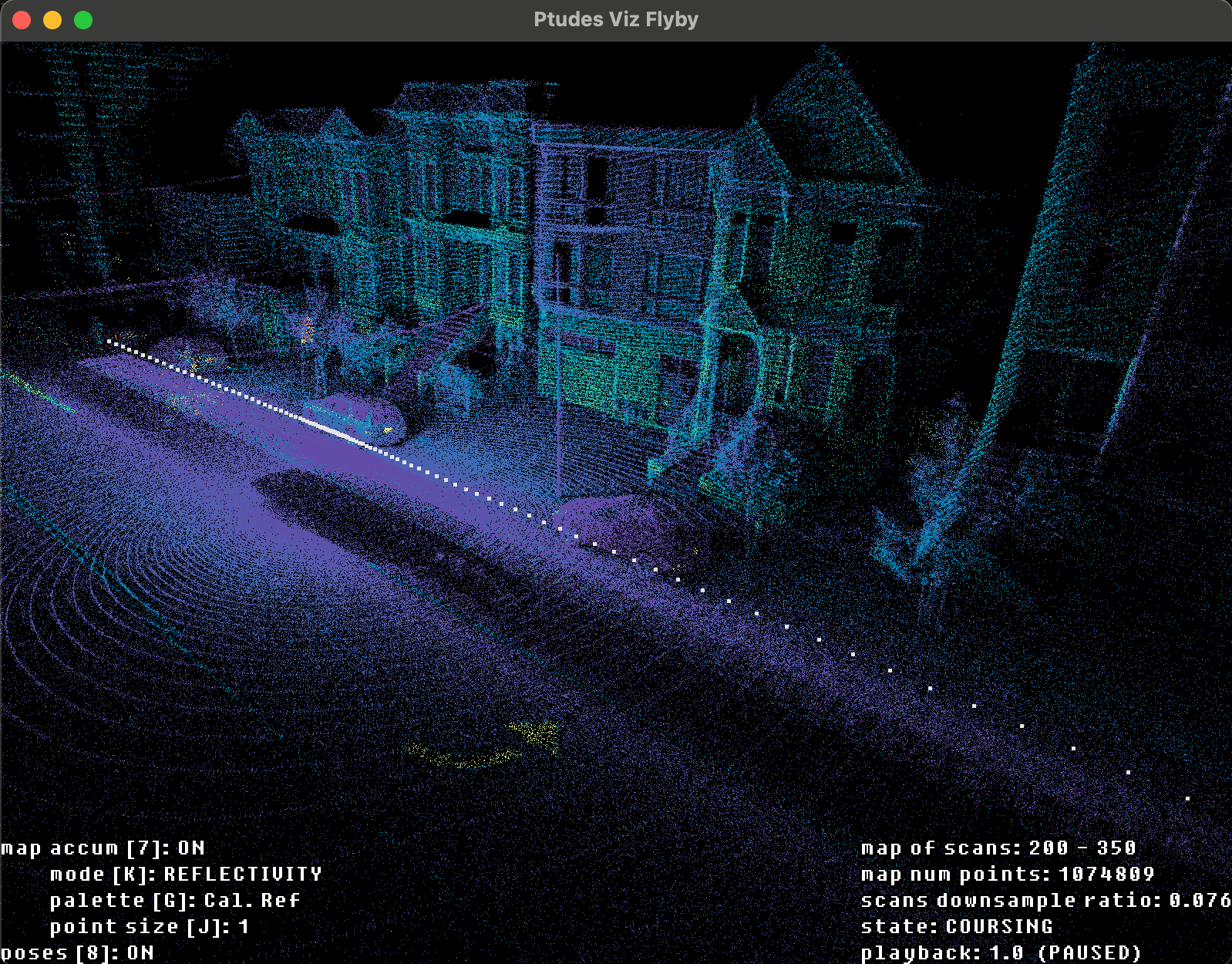
Flyby 3d visualizations of lidar data with poses
Review the registered point cloud map using the per scan poses of the odometry/slam pipeline with deskewing and point coloring by REFLECTIVITY, NEAR_IR, SIGNAL and RANGE channels (channels availability depends on the UDP Lidar Profile of the data).
Pre-requisite:
0. Installation
You can install ptudes-lab using Pip from the PyPi using:
pip install ptudes-lab
or you can install it in editable mode if you plan to modify the code (or want to use not yet released features):
git clone https://github.com/bexcite/ptudes-lab.git cd ptudes-lab pip install -e .
NOTE: Don’t forget to use venv or any other means of controlling the Python environments, they always save a lot of time later down the road.
1. Get Ouster sensor lidar data in a .pcap/.bag format
You can download a sample data from the official sensor docs:
Or you can record it from the sensor if you have one, using ouster-sdk/cli:
ouster-cli source <MY_SENSOR_IP> record
2. Get the lidar scans poses in kitti format
All my experiments based on KISS-ICP pose outputs in KITTI format. To get the scan poses you can run kiss-icp pipeline on the previously obtained Ouster .pcap data using:
kiss_icp_pipeline --deskew ./OS-0-128_v3.0.1_1024x10.pcap
You can use any pose source with --kitti-poses in the command ptudes flyby below and not necessarily KISS-ICP output. For example it can be the result of some post-processing step (smoothing, loop closure, fusion with other sensors etc) the only requirement is that the number of poses should be the same as the number of scans in the .pcap/.bag file.
How to run:
Once you have Ouster sensor .pcap/.bag data and poses per every scan in KITTI format you can run ptudes flyby command as:
ptudes flyby ./OS-0-128_v3.0.1_1024x10.pcap --kitti-poses ./OS-0-128_v3.0.1_poses_kitti.txt
or for example using .bag from Newer College dataset:
ptudes flyby ./newer-college/2021-ouster-os0-128-alphasense/collection1/2021-07-01-10-37-38-quad-easy.bag \
--meta ./newer-college/2021-ouster-os0-128-alphasense/beam_intrinsics_os0-128.json \
--kitti-poses ./2021-07-01-10-37-38-quad-easy_poses_kitti.txt \
--start-scan 20 \
--end-scan 50
Use --help to see more options like --start-scan/--end-scan to view only a specific range of scans.
Some useful keyboard shortcuts for flyby command:
Key |
Action |
|---|---|
SPACE |
Stop/Start flying |
> |
Increase/decrease flying speed |
8 |
Toggle poses/trajectory view |
k / K |
Cycle point cloud coloring mode of accumulated clouds or map |
g / G |
Cycle point cloud color palette of accumulated clouds or map |
j / J |
Increase/decrease point size of accumulated clouds or map |
ROS bags visualizations of raw lidar data
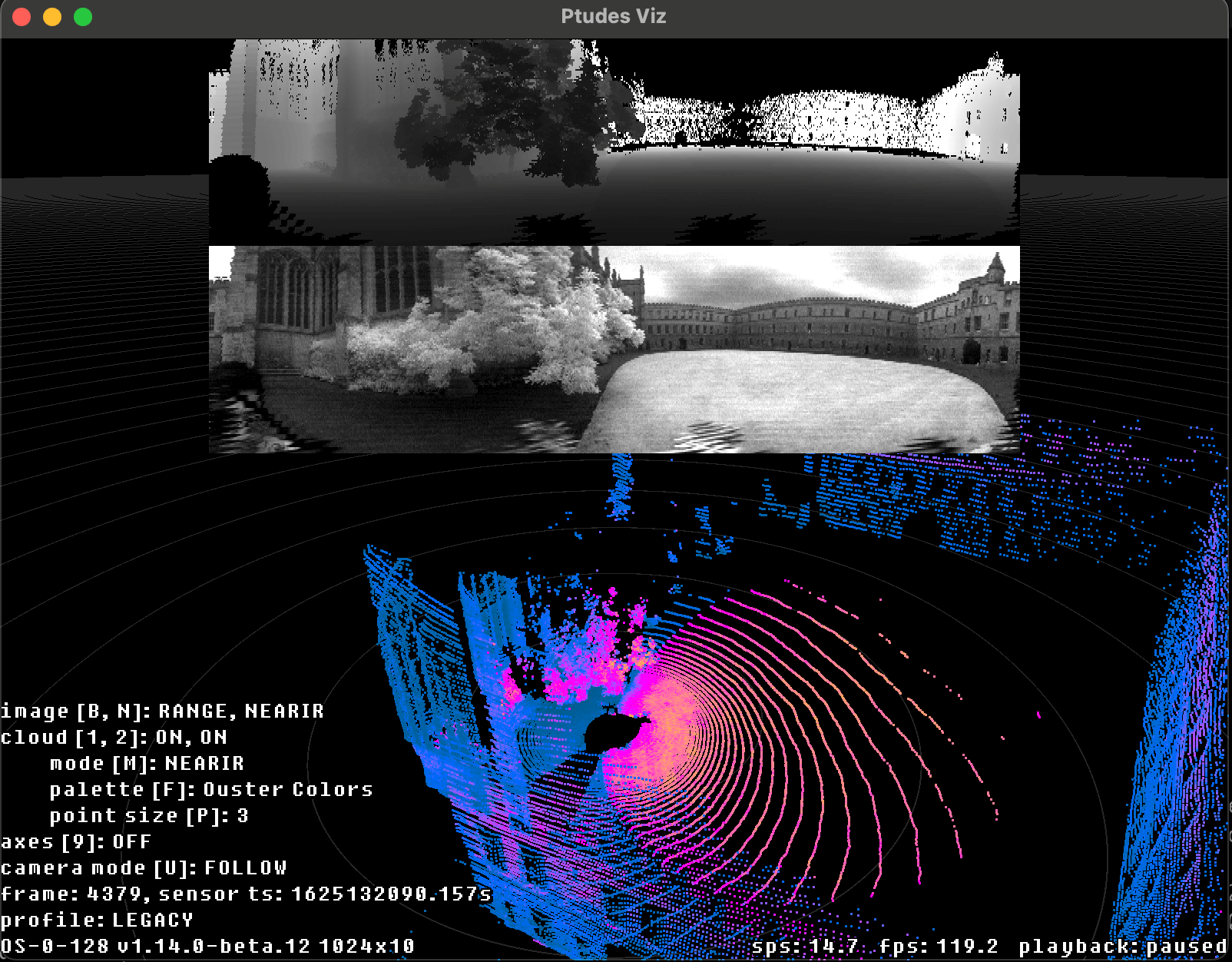
Ouster sensors produce raw lidar_packets/imu_packets data in corresponding ROS topics. To view the point cloud from such raw packets BAGs without spinning a ROS and installing all drivers one can use ptudes viz command.
Not tested with ROS2 bags:(
I wasn’t been able to locate the ROS2 bag with raw Ouster lidar_packets, so if you by any chance have such a ROS2 bag that you can share with me I can make sure that both ROS1 and ROS2 bags working for the ptudes viz command. (i.e. ptudes.bag.OusterRawBagSource packet source can work with ROS1/ROS2 bags)
For example to visualize Newer College dataset BAGS use:
ptudes viz ./newer-college/2021-ouster-os0-128-alphasense/collection1/2021-07-01-10-37-38-quad-easy.bag \
--meta ./newer-college/2021-ouster-os0-128-alphasense/beam_intrinsics_os0-128.json
and it will open:
Since the underlying Viz is the PointViz shipped with Ouster SDK the full list of keyboard shortcuts can be found here
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Hashes for ptudes_lab-0.0.2-py3-none-any.whl
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 | ec1cd86604b546f77073a7036ae6ee962528274c012b4f16c1cfc8258c5dfd6a |
|
| MD5 | b089827f998ce89ecb0e11b779770205 |
|
| BLAKE2b-256 | a223a83eb9624585e0aee61e238a7b3d6422d3c5618b0f5fa509746aeb67ac01 |







