Variable-height inverted pendulum balancing in Python.

Project description
VHIP balancing in Python
Python code for Biped Stabilization by Linear Feedback of the Variable-Height Inverted Pendulum Model.
The main script unrolls VHIP trajectories with different balance controllers and reproduces plots as in the paper:
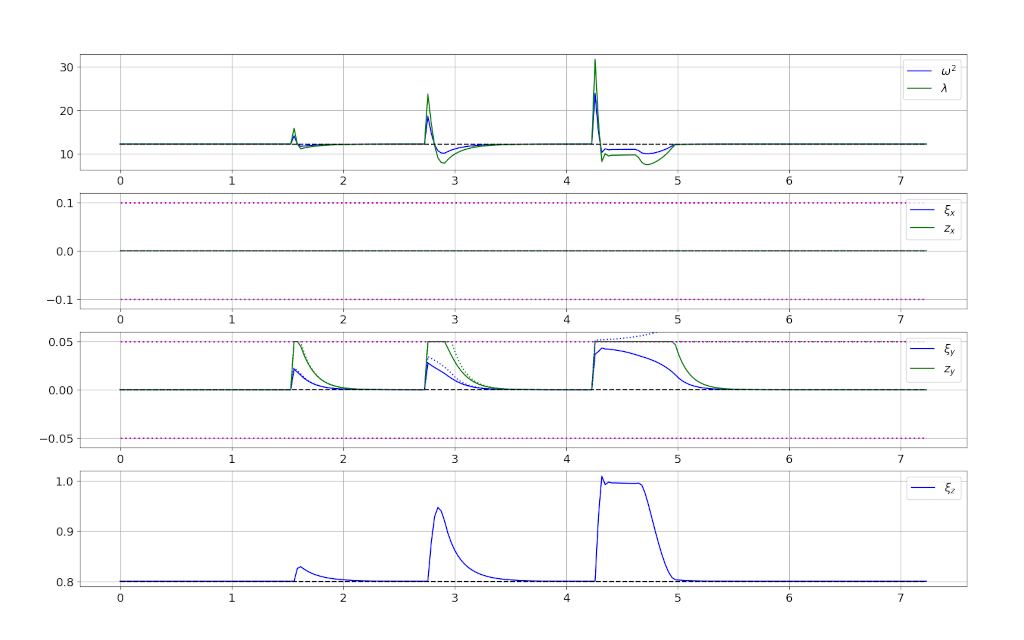
This repository is a lighter implementation of the original script vhip_stabilization.py that was released with the paper.
Installation
The recommended way is to use Conda:
conda create -f environment.yaml
conda activate vhip_light
Alternatively, you can install all dependencies from PyPI:
pip install cvxpy ipython matplotlib qpsolvers scipy
Usage
python main.py
See also
- vhip_stabilization.py: original Python prototype as a single script, with dependencies on OpenRAVE and pymanoid (now deprectated).
- VHIP walking controller: C++ version of the VHIP QP balancer that was validated on the HRP-4 humanoid robot.
Release history Release notifications | RSS feed

Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
vhip_light-1.0.0.tar.gz
(24.4 kB
view hashes)
Built Distribution
vhip_light-1.0.0-py3-none-any.whl
(27.2 kB
view hashes)
Close
Hashes for vhip_light-1.0.0-py3-none-any.whl
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 | 66852b15acf3b56663d08975f0d53d601b1ebc9c342a38223383d4e90637b9a0 |
|
| MD5 | 6c044e4d0e7df5d32a598ca955a141b5 |
|
| BLAKE2b-256 | 3f6e111dd1a690ed1f2b0a0670d47f0e9a805c08af9926d7c0fc829de01f8fe1 |







