A module to control BeagleBone IO channels



Project description
Adafruit Beaglebone I/O Python API



Adafruit BBIO is an API to enable GPIO, PWM, ADC, UART, SPI and eQEP (Quadrature Encoder) hardware access from Python applications running on the Beaglebone.
-
It is recommended to use an official BeagleBoard.org Debian image
- Currently recommended image: Debian 10.3 "Buster" IoT (2020-04-06) (default kernel is 4.19.x-ti)
-
Adafruit_BBIO supports Linux kernels 3.8 through 4.19
-
New versions of Adafruit_BBIO may break backwards compatibility. Please read the changelog.
-
It is recommended to use Python 3
Installation on Debian
Note: Follow the instructions on BeagleBoard.org to get connected to the Internet
Easiest:
sudo apt-get update
sudo apt-get install build-essential python3-dev python3-pip -y
sudo pip3 install Adafruit_BBIO
Manual:
sudo apt-get update
sudo apt-get install build-essential python3-dev python3-pip -y
git clone git://github.com/adafruit/adafruit-beaglebone-io-python.git
cd adafruit-beaglebone-io-python
sudo python3 setup.py install
Upgrade Adafruit_BBIO to latest version on PyPI:
sudo pip3 install --upgrade Adafruit_BBIO
Usage
Using the library is very similar to the excellent RPi.GPIO library used on the Raspberry Pi. Below are some examples.
Pin Numbers
Please note that there is no '0' prefix for the pin numbers. For example, pin 7 on header P8 is P8_7.
Correct:
GPIO.setup("P8_7", OUT )
INCORRECT:
GPIO.setup("P8_07", OUT )
Refer to pins_t table[] in common.c all the pin labels.
config-pin
config-pin is now used on the official BeagleBoard.org Debian Jessie and Stretch images to control pin mode (e.g. pin mux).
debian@beaglebone:~$ config-pin -q P9_14
P9_14 Mode: pwm
debian@beaglebone:~$ config-pin -l P9_14
default gpio gpio_pu gpio_pd pwm
debian@beaglebone:~$ config-pin P9_14 gpio
debian@beaglebone:~$ config-pin -q P9_14
P9_14 Mode: gpio Direction: in Value: 0
debian@beaglebone:~$ config-pin P9_14 pwm
debian@beaglebone:~$ config-pin -q P9_14
P9_14 Mode: pwm
GPIO Setup
Import the library, and setup as GPIO.OUT or GPIO.IN::
import Adafruit_BBIO.GPIO as GPIO
GPIO.setup("P8_14", GPIO.OUT)
You can also refer to the pin names::
GPIO.setup("GPIO0_26", GPIO.OUT)
GPIO Output
Setup the pin for output, and write GPIO.HIGH or GPIO.LOW. Or you can use 1 or 0.::
import Adafruit_BBIO.GPIO as GPIO
GPIO.setup("P8_14", GPIO.OUT)
GPIO.output("P8_14", GPIO.HIGH)
On-Board LEDs
On-board LEDs (USR0-USR3) are handled by LED class driver rather than the GPIO pin driver.
They have a different path in the /sys/ filesystem.
Setup the pin for output and write GPIO.HIGH or GPIO.LOW::
import Adafruit_BBIO.GPIO as GPIO
import time
for i in range(4):
GPIO.setup("USR%d" % i, GPIO.OUT)
while True:
for i in range(4):
GPIO.output("USR%d" % i, GPIO.HIGH)
time.sleep(1)
for i in range(4):
GPIO.output("USR%d" % i, GPIO.LOW)
time.sleep(1)
GPIO Input
Inputs work similarly to outputs.:
import Adafruit_BBIO.GPIO as GPIO
GPIO.setup("P8_14", GPIO.IN)
Polling inputs:
if GPIO.input("P8_14"):
print("HIGH")
else:
print("LOW")
Waiting for an edge (GPIO.RISING, GPIO.FALLING, or GPIO.BOTH:
GPIO.wait_for_edge(channel, GPIO.RISING)
or
GPIO.wait_for_edge(channel, GPIO.RISING, timeout)
Detecting events:
GPIO.add_event_detect("P9_12", GPIO.FALLING)
#your amazing code here
#detect wherever:
if GPIO.event_detected("P9_12"):
print("event detected!")
PWM
The PWM Duty Cycle range was reversed in 0.0.15 from 100(off)-0(on) to 0(off)-100(on). Please update your code accordingly.
import Adafruit_BBIO.PWM as PWM
#PWM.start(channel, duty, freq=2000, polarity=0)
#duty values are valid 0 (off) to 100 (on)
PWM.start("P9_14", 50)
PWM.set_duty_cycle("P9_14", 25.5)
PWM.set_frequency("P9_14", 10)
PWM.stop("P9_14")
PWM.cleanup()
#set polarity to 1 on start:
PWM.start("P9_14", 50, 2000, 1)
ADC
import Adafruit_BBIO.ADC as ADC
ADC.setup()
#read returns values 0-1.0
value = ADC.read("P9_40")
#read_raw returns non-normalized value
value = ADC.read_raw("P9_40")
UART
config-pin P9.21 uart # UART2_TXD
config-pin P9.22 uart # UART2_RXD
config-pin P9.24 uart # UART1_TXD
config-pin P9.26 uart # UART1_RXD
sudo pip install pyserial
import Adafruit_BBIO.UART as UART
import serial
UART.setup("UART1")
with serial.Serial(port = "/dev/ttyO1", baudrate=9600) as ser:
print("Serial is open!")
ser.write(b"Hello World!")
- Available UART names on BeagleBone
UART1: /dev/ttyO1, Rx: P9_26, Tx: P9_24UART2: /dev/ttyO2, Rx: P9_22, Tx: P9_21UART4: /dev/ttyO4, Rx: P9_11, Tx: P9_13UART5: /dev/ttyO5, Rx: P8_38, Tx: P8_37- note:
UART5requiresdisable_uboot_overlay_video=1in/boot/uEnv.txt
- Available UART names on PocketBeagle
PB-UART0: /dev/ttyO0, Rx: P1_30, Tx: P1_32PB-UART1: /dev/ttyO1, Rx: P2_11, Tx: P2_09PB-UART2: /dev/ttyO2, Rx: P1_08, Tx: P1_10
- Loopback test with UART1 and UART2
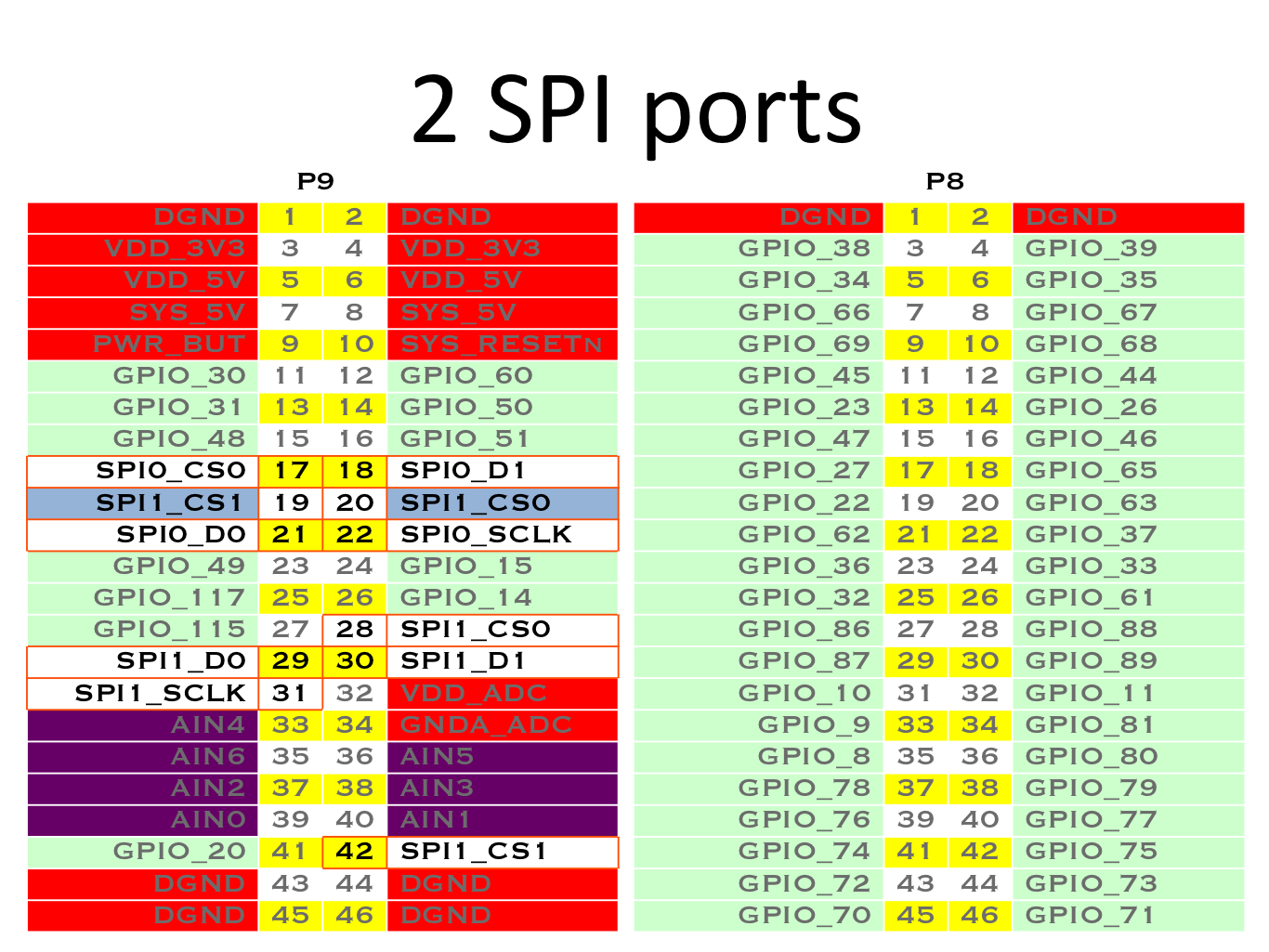
SPI
- Use
config-pinto set pin mode for SPI pins- SPI0
- SPI0_CS0:
config-pin p9.17 spi_cs - SPI0_D0:
config-pin p9.21 spi - SPI0_D1:
config-pin p9.18 spi - SPI0_SCLK:
config-pin p9.22 spi_sclk
- SPI0_CS0:
- SPI1
- SPI1_CS0:
config-pin p9.20 spi_cs - SPI1_CS0:
config-pin p9.28 spi_cs - SPI1_CS1:
config-pin p9.19 spi_cs - SPI1_CS1:
config-pin p9.42 spi_cs - SPI1_D0:
config-pin p9.29 spi - SPI1_D1:
config-pin p9.30 spi - SPI1_SCLK:
config-pin p9.31 spi_sclk
- SPI1_CS0:
- SPI0
- Example:
from Adafruit_BBIO.SPI import SPI
#spi = SPI(bus, device) #/dev/spidev<bus>.<device>
# /dev/spidev0.0
spi = SPI(1,0)
print(spi.xfer2([32, 11, 110, 22, 220]))
spi.close()
# /dev/spidev0.1
spi = SPI(1,1)
print(spi.xfer2([32, 11, 110, 22, 220]))
spi.close()
# /dev/spidev1.0
spi = SPI(2,0)
print(spi.xfer2([32, 11, 110, 22, 220]))
spi.close()
# /dev/spidev1.1
spi = SPI(2,1)
print(spi.xfer2([32, 11, 110, 22, 220]))
spi.close()
eQEP
To use the enhanced Quadrature Encoder Pulse (eQEP) module, please refer to the Encoder module's documentation.
Running tests
Install py.test to run the tests. You'll also need the python compiler package for pytest:
sudo pip3 install pytest
Execute the following in the root of the project:
pytest
NOTE: sudo should not be required as udev configures group ownership and permission for GPIO and PWM
Reporting issues
When reporting issues, plesae run the following script which will print the system configuration:
sudo /opt/scripts/tools/version.sh
and paste the output in a reply.
This script should be present for any Debian or Ubunut image downloaded from: https://beagleboard.org/ or https://rcn-ee.com/
Credits
The BeagleBone IO Python library was originally forked from the excellent MIT Licensed RPi.GPIO library written by Ben Croston.
License
Written by Justin Cooper, Adafruit Industries. BeagleBone IO Python library is released under the MIT License. 1.1.2
Daniel Nguyen (2): Update common.c Update common.c
Drew Fustini (28): upload to PyPI againt to resolve #293 do not set pinmux on the beaglebone blue remove deug output Fix dead link to bone.js #296 force Encoder period to be an integer #299 Ignore new compiler warnings in gcc 8.2.0 Update setup.py do not set pin mode for built-in USRn LEDs Change name of P1_3 to match bone.js Fix warning about casting incompatible function types #308 Fix warning print format strings being truncated #308 Fix warning about casting incompatible function types #308 Fix warnings on format truncation and sizeof in strncpy #308 Fix warning about casting incompatible function types #308 Update travis config to specify Python 3.6 Update tox.ini to Python 3.6 Merge pull request #321 from adafruit/issue308 Update ISSUE_TEMPLATE.md Update README.md Update README.md Merge pull request #327 from zer0cod3r/master Merge pull request #337 from SamPovilus/docfix Update README.md Update README.md Update README.md remove -Werror from CFLAGS Remove suppression of gcc warnings in CFLAGS #336 Update version in setup.py to v1.2
Sam Povilus (1): fixing document locaiton and version as current location dosn't load
1.1.1
Attempt upload to PyPI again to avoid error reported in issue #293
1.1.0
Aaron Marburg (1):
- Added usleep after successfully enabling PWM via udev.
Drew Fustini (16):
- Merge pull request #233 from zsserg/fixed_segfault_in_event_detection
- Merge pull request #257 from zsserg/develop
- Merge pull request #251 from amarburg/master
- Merge pull request #271 from fcooper/documentation-updates
- Update ADC.rst
- Update Encoder.rst
- Update ADC.rst
- Add UART entries for the PocketBeagle (issue #242)
- update install and test shell scripts
- update UART section in README
- Merge pull request #282 from erikwelsh/master
- do not load overlays for the beaglebone blue #283
- Merge pull request #284 from sam-bristow/py3-docs
- Merge pull request #285 from sam-bristow/bugfix/uart-error-reporting
- fix pwm on pocketbeagle and beaglebone blue #286
- remove debug logging
Erik Welsh (1):
- Fixed GPIO export problem; Leaves GPIO in bad state on latest BeagleBone image on PocketBeagle
Franklin S Cooper Jr (3):
- docs/SPI.rst: Fix bus numbering in examples
- docs/GPIO.rst: Add information on blinking led
- docs/GPIO.rst Make documentation a bit newbie friendly
Sam Bristow (3):
- Use print() function in all code and docs
- Use new python-serial API
- Return error-code for failing interface
zserg (5):
- Fixed SEGFAULT when calling remove_event_detect() inside python callback function.
- Fixed SEGFAULT when calling remove_event_detect() inside python callback function.
- Fixed SEGFAULT in event_gpio,c run_callbacks() * Added more elaborate epoll() error logging
- Minor style fixes
1.0.10
features
- automatically set pin modes for UART (PR #158)
- Encoder: README.md: added note about eqep group change (PR #214)
- deprecate out of date Adafruit_I2C.py (PR #215)
- Add Encoder module info to main README.md (PR #217)
- Add automatic API documentation generation (PR #219)
- Separate API docs into modules (PR #221)
shortlog
-
David Planella (46):
- Encoder: README.md: added note about eqep group change
- Add Encoder module info to main README.md
- Added docstrings using Google syntax and Sphinx support to generate the API documentation for the Encoder and PWM modules for now.
- Made kernel version check to happen only if running on a beaglebone. The readthedocs builders that import the Encoder module have an old 3.3 kernel and the autodoc build fails
- Use the default readthedocs theme
- Use readthedocs theme if building docs there, remove redundand search link
- Readthedocs theme tweaks
- Removed redundant TOC, added global description
- Added UART documentation
- Added documentation badge
- Added ADC API docs, fixed UART module definition
- API docs: added SPI module
- Added SPI module attribute docs
- Added Python badges to README file
- Added SPI pins table and first shot at GPIO module. Functions still need to be documented
- Merge branch 'readthedocs' of https://github.com/dplanella/adafruit-beaglebone-io-python into readthedocs
- Documented the API docs build process
- Added docstrings using Google syntax and Sphinx support to generate the API documentation for the Encoder and PWM modules for now.
- Made kernel version check to happen only if running on a beaglebone. The readthedocs builders that import the Encoder module have an old 3.3 kernel and the autodoc build fails
- Use the default readthedocs theme
- Use readthedocs theme if building docs there, remove redundand search link
- Readthedocs theme tweaks
- Removed redundant TOC, added global description
- Added UART documentation
- Added documentation badge
- Added ADC API docs, fixed UART module definition
- API docs: added SPI module
- Added SPI module attribute docs
- Added Python badges to README file
- Added SPI pins table and first shot at GPIO module. Functions still need to be documented
- Documented the API docs build process
- Merge branch 'readthedocs' of https://github.com/dplanella/adafruit-beaglebone-io-python into readthedocs
- Update README.md
- Added some more API doc content
- Sync from upstream master
- Minor documentation and configuration improvements
- Finished documenting GPIO
- rST fixes
- Update README.md
- Minor API doc improvements
- Merge branch 'readthedocs' of https://github.com/dplanella/adafruit-beaglebone-io-python into readthedocs
- Generate the API documentation from a master index and a separate file for each module
- Sync from upstream master
- Improvements to the API docs output config
- Update docs generation description to reflect new separate modules
- Updated ADC API docs
-
Drew Fustini (10):
- use set_pin_mode() to set uart pinmux (#158)
- Add SPI instructions to README (#158)
- Update README.md
- Fix spidev path mismatch (#216)
- Merge pull request #217 from dplanella/patch-2
- Merge pull request #214 from dplanella/patch-1
- Deprecate Adafruit_BBIO.I2C in favor of Adafruit_GPIO.I2C (#215)
- Merge pull request #219 from dplanella/readthedocs
- relocate doc dir to avoid confusion (#218)
- Merge pull request #221 from dplanella/readthedocs
1.0.9
Features:
- Issue #194: Encoder position cannot be set
- PR #205: Encoder: add support for reading/writing sysfs attributes
Fixes:
- Issue #198: use https for DEFAULT_URL in distribute_setup.py
- Issue #197: Fix leak of pwm enable file descriptor
- Issue #189: Fix seg fault of PWM in Python 3.6
- Issue #180: Clarify there is no 0 prefix for pin lables
- PR #201: Encoder: do kernel check, PEP8 cleanup
- PR #202: Encoder: corrected kernel check logic
- PR #207: Encoder: improved usage documentation
- PR #210: Encoder: fix sysfs import, make code Python 3 compatible
- PR #212: Encoder: fix Python 3 compatibility
- PR #213: Encoder: fix frequency calculation from period
shortlog:
-
David Planella (18):
- Encoder: initialize only the given channel
- Sync from master
- Encoder: do kernel check, PEP8 cleanup
- Encoder: added sysfs module
- Encoder: use sysfs to write QEP attributes
- Encoder: corrected kernel check logic
- Merge pull request #2 from adafruit/master
- Encoder: convert get/set methods to properties, update apidoc strings
- Encoder: updated README
- Encoder: add README apt install clarification
- Encoder: copyright assignment note, updated comments
- Encoder: added usage notes
- Encoder: improved usage documentation
- Encoder: minor fix to usage example
- Encoder: added a note about permissions
- Encoder: switched sysfs to be a relative import compatible with Python 2 and 3
- Encoder: use items() instead of iteritems() to be Python 3 compatible
- Encoder: fix frequency getter
-
Drew Fustini (18):
- use https for DEFAULT_URL in distribute_setup.py (#198)
- fix except syntax for Python 3
- use dict.items() instead of dict.iteritems() for Python 3
- fix error in set_brightness()
- close enable_fd when stopping PWM output (#197)
- Merge pull request #199 from dplanella/patch-1
- Fix leak of pwm enable file descriptor (#197)
- Merge pull request #201 from dplanella/encoder-cleanup
- remove test_rotary.py as not valid for pytest
- Fix seg fault of PWM in Python 3.6 (#189)
- Merge pull request #202 from dplanella/patch-2
- Clarify there is no 0 prefix for pin lables (#180)
- Merge pull request #205 from dplanella/encoder-sysfs
- assign copyright for new file to Adafruit Industries
- Add bash scripts to help install and test
- Merge pull request #212 from dplanella/patch-4
- Merge pull request #207 from dplanella/patch-3
- Merge pull request #213 from dplanella/fix-encoder-frequency
1.0.8
Fixes:
- Issue #196: cache board type to avoid poor performance
- Issue #192: fix PocketBeagle PWM pin typo
- Issue #191: turn off RotaryEncoder's debug output by default
- Issue #188: GPIO is extremely slow (20ms to toggle)
- Issue #186: problems with UART
shortlog:
-
David Planella (12):
- Copy Encoder module comments to README.md
- Formatted Encoder README in markdown
- Fixed Encoder README formatting
- Removed QEP instructions from Encoder module
- Fixes to Encoder README
- Updated Encoder README
- Encoder README: added info on dedicated overlays
- Encoder README: updated info on pre-requisites
- Encoder README update
- Encoder README update
- Add logging support, turn off unconditional debug output
- Encoder: remove unused logging code
-
Drew Fustini (3):
- Merge pull request #195 from dplanella/master
- Fix PocketBeagle PWM pin typo (#192)
- cache board type to avoid poor performance (#196)
1.0.7
Fixes:
- Issue #188: GPIO is extremely slow (20ms to toggle)
shortlog:
- Drew Fustini (4):
- Update README.md
- add config-pin example to README
- Filter DEBUG syslog to avoid poor performance #188
- Change log level from INFO to DEBUG #188
1.0.6
- Currently recommended image: Debian 9.2 "Stretch" iot (2017-10-29)
- Install Linux kernel 4.14.x to enable non-root control of GPIO and PWM (commit)
Features:
- Add support for Linux 4.14 kernel including new "udev" style for PWM entries in /sys
- Fix GPIO regression due to BeagleBone Blue LED support (issue #178)
- Add support for the PocketBeagle (issue #172)
shortlog:
-
Drew Fustini (39):
- Add -Wno-unit_address_vs_reg to avoid dtc warning
- check if board is BeagleBone Blue or PocketBeagle
- check if BeagleBone Blue before accessing non-standard LEDs
- Add test for GPIO regression #178
- change syslog mask level to DEBUG
- add "Adafruit_BBIO" to syslog()
- update test for issue #178
- remove polarity "hack" for PWM #170
- move pwm_set_polarity() after period is set
- add test for issue #170
- only check kernel overlays if u-boot overlays are not being used
- Attempt to use udev ecap path for pwm path
- add test script for all BeagleBone PWM outputs
- update PWM test for 4.14 kernel udev paths
- minor change to pwm debug logging
- sleep to avoid udev race condition #185
-
Mark A. Yoder (1):
- Added BAT25, BAT50, BAT75, BAT100 and WIFI LEDs
-
Peter Lawler (1):
- Missing CR/LF
-
Robert Nelson (10):
- source/common.c: add initial PocketBeagle values
- source/common.c: PocketBeagle, no slots file, everything built-in
- source/common.c: PocketBeagle, no slots file disable here too
- source/c_pwm.c: HACK: U-Boot pre-setup everything, dont search for specific overlay
- source/c_pwm.c: HACK: PocketBeagle: v4.14.x
- source/c_pwm.c: debug pwm_path/pwm_path_udev
- source/c_pwm.c: pwm: add support for pwmchipX/pwm-X:Y syntax
- source/c_pwm.c: disable pwm_set_polarity (broken in v4.9.x/v4.14.x)
- source/common.c: Blue Fix GP0_3 id
- source/common.c: PocketBeagle Fix P2.24
1.0.5
-
@pdp7 (5):
- Merge pull request #153 from MarkAYoder/master
- Fix print syntax to avoid python3 errors
- Merge pull request #160 from MarkAYoder/master
- document how to read QEP1
- Update rotary-encoder-eqep-test.md
-
@MarkAYoder (20):
- Have GP0_1 working
- Removed --force to speed things up
- Added GP0 1, 2 and 3
- Flashes 4 LEDs
- Works with button
- Blinks red and gree LEDs
- Blinks all 6 GPIOs
- Added red and green LEDs
- i2c works
- PWD isn't working, yet
- Added port setup
- Switched to apt install
- Added tmp101 to name
- Added LED matrix example
- Removed newline from print
- Added fade
- Adding GPIO defs for uart1
- Testing UT1_0, not working yet
- Switched GP0_0 to GP0_3, etc.
- Added PAUSE and MODE buttons.
1.0.4
-
@djsutton (1):
- fix TypeError: function takes exactly 3 arguments (2 given) from wait_for_edge
-
@pdp7 (29):
- Instruct users to open GitHub issue instead email
- add udev rules and script for non-root access to gpio
- fix file descriptor leak in gpio_set_value()
- document how to test read and write to all GPIO pins
- reduce ADC reads in pytest from 10,000 to 1,000
- close file descriptor to avoid leak
- remove conditional logic for ctrl_dir and ocp_dir size
- increase size of ctrl_dir and ocp_dir for future use
- Document how to run config-pin at boot
- Document how to test eQEP with Rotary Encoder
- Add skeleton for Encoder module to read eQEP
- Add code to Encoder.QEP from PyBBIO.RotaryEncoder
- Adapt code from PyBBIO.RotaryEncoder
- add test for rotary encoder
- read from eqep position file
- return position from getPosition()
- document howo to enable all the eqep pins
- Document how to test eqep pins with rotary encoder
- run config-pin to set pin mux for qep
- update QEP test
- update QEP test for issue #122
- Test if kernel booted wit u-boot overlays
- check if kernel cmdline for uboot overlay
- Add documentation about u-boot overlays
- Return BBIO_OK when u-boot overlays ared enabled
- remove debug printing
- Skip check for device tree loaded if u-boot overlays enabled
- Sleep after loading ADC overlay to allow driver load
- Workaround test failure until TIMERn bug is fixed
-
@ltjax (3):
- Use lookup table to prevent duplicate pin export
- Handle already exported pins
- Fix build_path memory leak
-
@Vadim-Stupakov (1):
- Fixed issue #145 GPIO library doesn't free GPIO file descriptor. File descriptor leak. Made a little bit refactoring
-
@cocasema (8):
- Declare PHONY targets in root Makefile
- Extract BBIO_err into a separate header
- Add syslog and debugging messages
- Add libadafruit-bbio with C++ wrappers for PWM/GPIO
- Add 2 versions of library with c++98 and c++11 abi
- Install header files properly
- Add default values to pwm::start() method.
- Add PWM c++ tests
-
@zsserg (2):
- Added error checking for setting pin direction in gpio.setup() (Python)
- Added debug output to set_pin_mode()
1.0.3
- Add -Wno-strict-aliasing to CFLAGS to ignore gcc warning
- Resolves GitHub issue #133 by @archey
1.0.2
- Merge pull request #130 from adafruit/issue129-usr-leds [1439133]
- Add support for alternate USR LED labels
- Merge pull request #131 from adafruit/fix-gcc-warnings [f0ee018]
- Fix gcc warnings
- Merge pull request #132 from buckket/setup_unicode_fix [4c67dfc]
- Make use of io.open() with explicit file encoding in setup.py
1.0.1
- Merge pull request #124 from jpbarraca/master [cf9771a]
- Timeout support for wait_for_edge (replaces PR #62)
- Merge pull request #123 from bubbapizza/master [8b4f7f2]
- Added a delay parameter for GPIO.setup() for udev permissions
- Merge pull request #121 from dengber/master [50e8883]
- ADC.read() returns wrong value
- Merge pull request #64 from olegantonyan/master [d1e8dc1]
- Wait until GPIO file appears on the /sys filesystem (issue #36)
- Merge pull request #106 from cocasema/master [12b79d7]
- Treat warnings as errors
- Merge pull request #119 from JesseMcL/pr [e7e987a]
- Add GPIO pullup configurations and fix PWM Segfault on kernel 4.1+
- Merge pull request #116 from kozga/master [1b04cdf]
- Fix SPI: IOError: [Errno 22] Invalid argument in xfer and xfer2 funct…
1.0.0
- Merge pull request #108 from MatthewWest for PWM support in Linux kernel 4.1+
- Merge pull request #96 from PeteLawler for ADC support in Linux kernel 4.1+
- Finally publish new version to PyPi
- Bump major version number to signify long duration since last release
0.0.30
- Merge Python 3 compatibility fixes from Github user westphahl.
- Moved old Angstrom build fix for missing py_compile from setup.py to separate file.
0.0.20
- Fix for SPI not loading spidevX.X correctly based on load order
- Initialize ctrl_dir in unload_device_tree #63
- Clean up unused/dead code
0.0.19
- Fix for SPI.xfer crashes python after 3 calls
- Added a retry to reading for the analog inputs to avoid a bug where reading back and forth between two analog inputs would cause the resource to be unavailable every 16 scans (zthorson)
- Updated the build_path to be more selective over what paths it chooses (zthorson)
- Update Debian installation instructions in README (justinledwards)
- Increase the size of the buffer used for storing device tree names (SaintGimp)
0.0.18
- UART - Include UART overlays, and compile upon installation
- UART - Rename UART overlays
- Adafruit_I2C - Remove readU16Rev and readS16Rev
- Adafruit_I2C - Updated readU16/readS16 for correct 16-bit reads
0.0.17
- Fix SPI memory leaks
- Clean up of PWM code (bit-hacker, jwcooper)
- Remove UART debug statements
0.0.16
- Add polarity as optional fourth parameter to PWM.start(). Valid values are 0 and 1. Default is still 0.
- Fix for actually setting the polarity in start.
- Add new unit tests to check that the polarity is being set properly, and valid values passed in.
0.0.15
- Fix PWM duty cycle so 0 is off and 100 is on. Set polarity to 0 by default.
- Give extra buffer space in export, and unexport functions for gpio that are more than 2 digits (Chris Desjardins)
- Add new test case for 3 digit gpio (Chris Desjardins)
- Fix for test_direction_readback. gpio_get_direction wasn't properly null terminating the direction string (Chris Desjardins)
0.0.14
- Fix GPIO.gpio_function to work with the IO name (zthorson)
- Fix IOErrors not getting raised when fopen fails while loading overlays into device tree (bradfordboyle, jwcooper)
- Add new UART tests
0.0.13
- Remove the gpio parameter from callbacks (cdesjardins)
0.0.12
- Bump version due to pypi issues
0.0.11
- New UART module to export UART overlays
- Alpha support for SPI
- Add small delay after loading any device tree overlays
0.0.10
- Fix direction for event detection code
- Fix for segmentation faults on add_event_detect
0.0.9
- Fix for ADC Segmentation Faults
0.0.8
- Temp remove overlay compilation. Ubuntu failures.
0.0.7
- Refactor and clean up adc and pwm
- Fix tests for Adafruit_BBIO rename
0.0.6
- Include Adafruit_I2C.py as top-level module
0.0.5
- Rename from BBIO to Adafruit_BBIO to reduce library conflicts and confusion.
0.0.4
- Support for pip and easy_install
0.0.3
- ADC enabled
0.0.2
- PWM enabled
0.0.1
- Initial Commit
- GPIO mostly working
- Initial GPIO unit tests
- PWM in progress









{kind=link}
{kind=link}