URDF description of the JVRC humanoid model.

Project description
JVRC humanoid robot model


This package contains the robot description for the JVRC-1 model, a virtual humanoid robot released for education and research.
Python module
This module helps retrieve the JVRC-1 model from a Python program. Import it by:
import jvrc_description
It then provides the following paths:
-
jvrc_description.path -
Path to the
jvrc_descriptionfolder itself. -
jvrc_description.meshes_path -
Path to the
meshesfolder. -
jvrc_description.urdf_path -
Path to the
jvrc1.urdfURDF file of the model.
Show and tell
Feel free to open a PR to share what you have done with this model.
| Date | Topic | Screenshot |
|---|---|---|
| 2019 | Docker image of a walking controller in simulation — Snapshot of a whole-body controller used on the HRP-4 humanoid to walk and climb stairs. This image includes a fully functional build and simulation environment where you can try the controller on the JVRC model. | 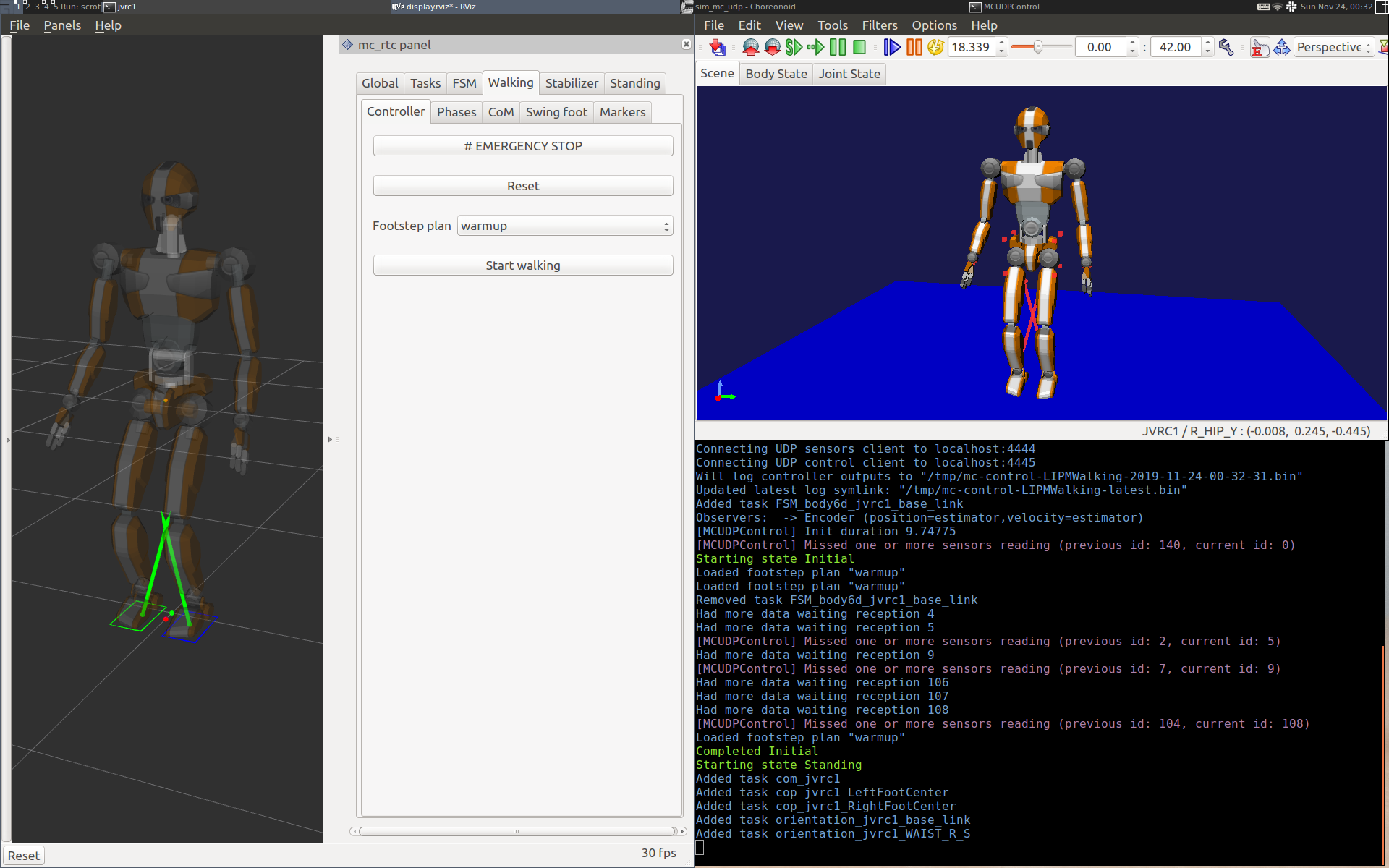 |
| 2016 | Task-based inverse kinematics in Python — A whole-body inverse kinematics based on the weight-prioritized multi-task framework. Tasks include foot-surface contacts, center of mass or centroidal momentum control. Depends on OpenRAVE. | 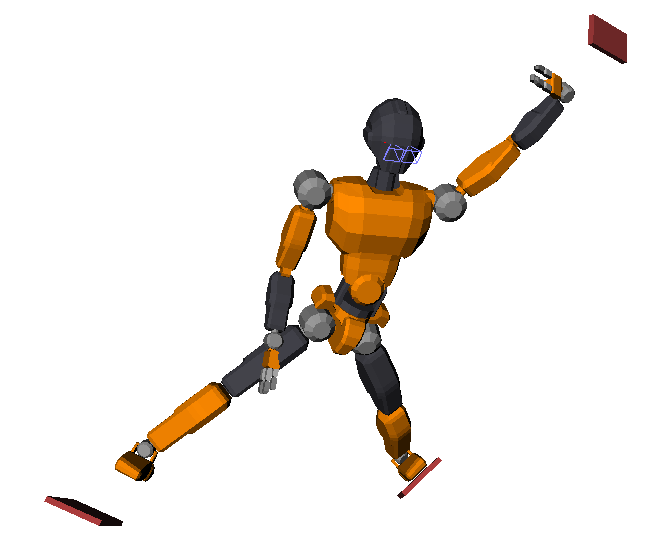 |
Release history Release notifications | RSS feed


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
jvrc_description-1.1.0.tar.gz
(666.9 kB
view hashes)
Built Distribution
Close
Hashes for jvrc_description-1.1.0-py3-none-any.whl
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 | 2a58e004b250d18fb7c6fa38ee5721010870ce1f3540458273f9e365cbb4cc6b |
|
| MD5 | 8aa8b98135e66adf51aa69746881dab3 |
|
| BLAKE2b-256 | f7dbf6f762384a78d49d9f03d655c45fe8cfaffbe7288943effb7cf48b5fb8eb |







