Linear time-variant model predictive control in Python.

Project description
ltv-mpc
Installation | Documentation | Example | Contributing




Linear time-variant (LTV) model predictive control in Python. Solve a quadratic program of the form:

This module is designed for prototyping. If you need performance, check out one of the related libraries below.
Installation
pip install ltv-mpc
Usage
This module defines a one-stop shop function:
solve_mpc(problem: Problem) -> Solution
The Problem type defines the model predictive control problem (LTV system, LTV constraints, initial state and cost function to optimize) while the Solution holds the resulting state and input trajectories.
Example
Let us define a triple integrator:
import numpy as np
horizon_duration = 1.0 # [s]
N = 16 # number of discretization steps
T = horizon_duration / N
A = np.array([[1.0, T, T ** 2 / 2.0], [0.0, 1.0, T], [0.0, 0.0, 1.0]])
B = np.array([T ** 3 / 6.0, T ** 2 / 2.0, T]).reshape((3, 1))
Suppose for the sake of example that acceleration is the main constraint acting on our system. We thus define an acceleration constraint |acceleration| <= max_accel:
max_accel = 3.0 # [m] / [s] / [s]
accel_from_state = np.array([0.0, 0.0, 1.0])
C = np.vstack([+accel_from_state, -accel_from_state])
e = np.array([+max_accel, +max_accel])
This leads us to the following linear MPC problem:
from ltv_mpc import Problem
x_init = np.array([0.0, 0.0, 0.0])
x_goal = np.array([1.0, 0.0, 0.0])
problem = Problem(
transition_state_matrix=A,
transition_input_matrix=B,
ineq_state_matrix=C,
ineq_input_matrix=None,
ineq_vector=e,
initial_state=x_init,
goal_state=x_goal,
nb_timesteps=N,
terminal_cost_weight=1.0,
stage_state_cost_weight=None,
stage_input_cost_weight=1e-6,
)
We can solve it with:
from ltv_mpc import solve_mpc
solution = solve_mpc(problem, solver="quadprog")
The solution holds complete state and input trajectories as stacked vectors. For instance, we can plot positions, velocities and accelerations as follows:
import pylab
t = np.linspace(0.0, horizon_duration, N + 1)
X = solution.stacked_states
positions, velocities, accelerations = X[:, 0], X[:, 1], X[:, 2]
pylab.ion()
pylab.plot(t, positions)
pylab.plot(t, velocities)
pylab.plot(t, accelerations)
pylab.grid(True)
pylab.legend(("position", "velocity", "acceleration"))
This example produces the following trajectory:
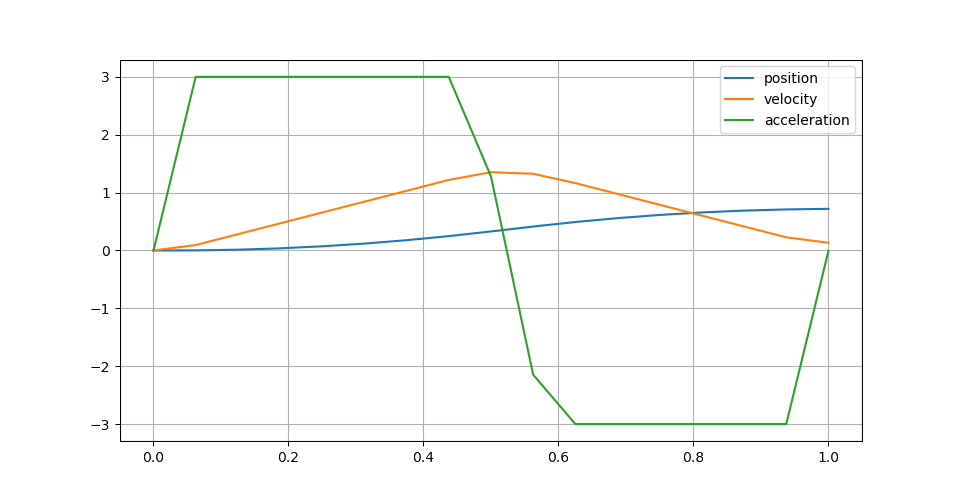
The behavior is a weighted compromise between reaching the goal state (weight 1.0) and keeping reasonable finite jerk inputs (weight 1e-6). The latter mitigate bang-bang accelerations but prevent fully reaching the goal within the horizon. See the examples folder for more examples.
🏗️ Work in progress
This module is still under development and its API might change. Future works may include:
- Complete documentation
- Complete test coverage
- General linear stage cost functions
See also
This module is designed for prototyping. If you need performance, check out one of the following libraries, and open a PR if you know other relevant ones:
| System | Library | Language | License |
|---|---|---|---|
| Linear time-invariant | Copra (original) | C++ | BSD-2-Clause |
| Linear time-variant | Copra (fork) | C++ | BSD-2-Clause |
| Nonlinear | Crocoddyl | C++ | BSD-3-Clause |


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.







