URDF description for the Upkie wheeled biped.

Project description
Upkie wheeled biped robot
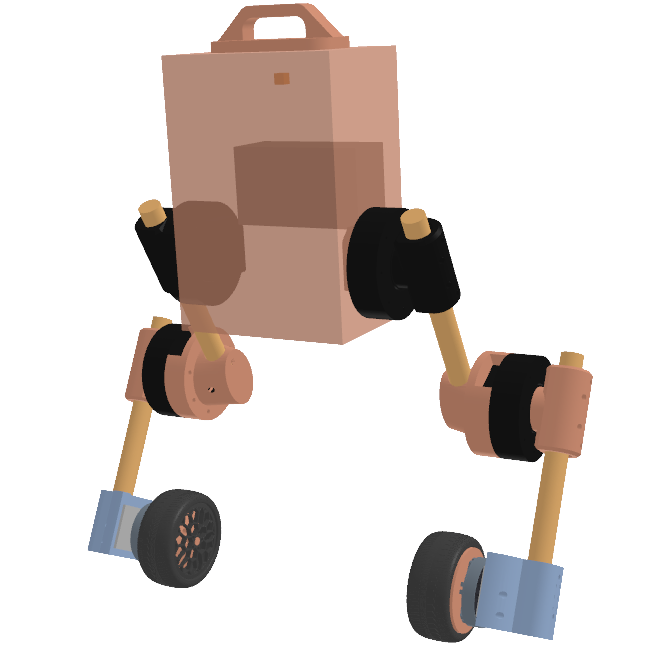
URDF description for the Upkie wheeled biped. See also:
Upkie's head derives from the chassis of the mjbots quad.
Python module
This module helps retrieve Upkie's model from a Python program. Assuming we import it by:
import upkie_description
We can then use the following paths:
-
upkie_description.path - Path to the ``upkie_description`` folder itself.
-
upkie_description.meshes_path - Path to the ``meshes`` folder.
-
upkie_description.urdf_path - Path to the ``upkie.urdf`` URDF file of the model.


Download files
Download the file for your platform. If you're not sure which to choose, learn more about installing packages.
Source Distribution
Built Distribution
Close
Hashes for upkie_description-1.1.0-py3-none-any.whl
| Algorithm | Hash digest | |
|---|---|---|
| SHA256 | 99b0b76b66dee46f431194a2b7937e8c6eefd47215d6b051c5d18d57c449366f |
|
| MD5 | 8a7564212dac0f209ece8276d80b4070 |
|
| BLAKE2b-256 | 97fe613958cf999bc61cb7136fdcb96450b7bc459810939674ce5a909e60ef78 |







